Synthetic 2D LIDAR for Precise Vehicle Localization in 3D Urban Environment
摘要
本文提出了一种精确的三维城市环境中车辆定位算法,该算法只有一个二维激光雷达和里程计信息。提出了一种新的合成二维激光雷达思想来解决虚拟二维平面上的定位问题。基于合成激光雷达测量和里程计信息,采用蒙特卡罗定位方案进行车辆位置估计。通过在NUS校园区域内1.5公里的驾驶测试中进行实时定位,证明了该算法的精度和鲁棒性。
介绍
本文提出了一种精确的三维城市环境中车辆定位算法,该算法只有一个二维激光雷达和里程计信息。提出了一种新的合成二维激光雷达思想来解决虚拟二维平面上的定位问题。基于合成激光雷达测量和里程计信息,采用蒙特卡罗定位方案进行车辆位置估计。通过在NUS校园区域内1.5公里的驾驶测试中进行实时定位,证明了该算法的精度和鲁棒性。
局部几何信息,即点的法向量和分布,对于基于lidar的同步定位和映射(SLAM)至关重要,因为它为数据关联提供了约束,进一步决定了优化的方向,最终影响了定位精度。然而,即使在kdtree或体积图的帮助下,估计点的正态分布和分布也是耗时的任务。为了实现快速法线估计,我们研究了激光雷达扫描的结构,提出了一种基于环的快速近似最小二乘(Ring FALS)方法
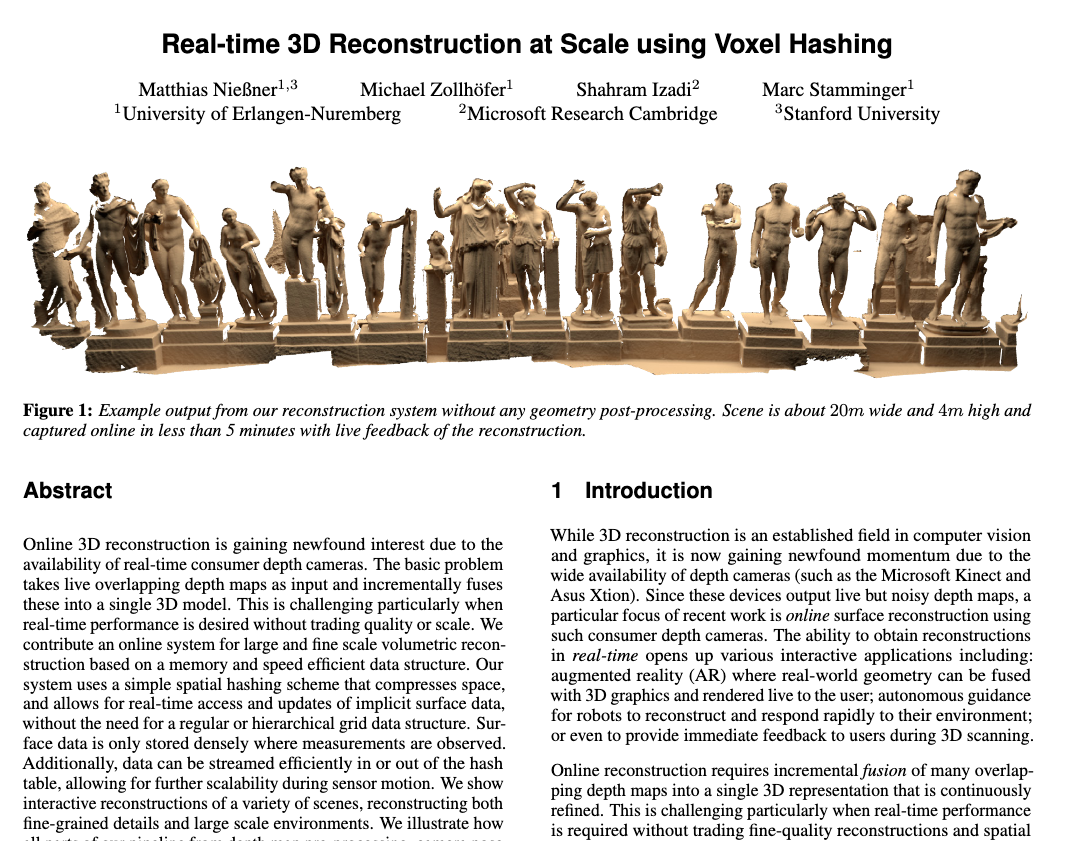
由于实时消费深度相机的可用性,在线三维重建正在获得新的兴趣。基本问题以实时重叠的深度图作为输入,并将它们增量地融合到单个3D模型中。
这具有挑战性,特别是如何满足实时性能需求同时质量和规模性能都不下降。我们提供了一个在线系统,用于基于内存和速度高效的数据结构的大规模和精细的体积重建。
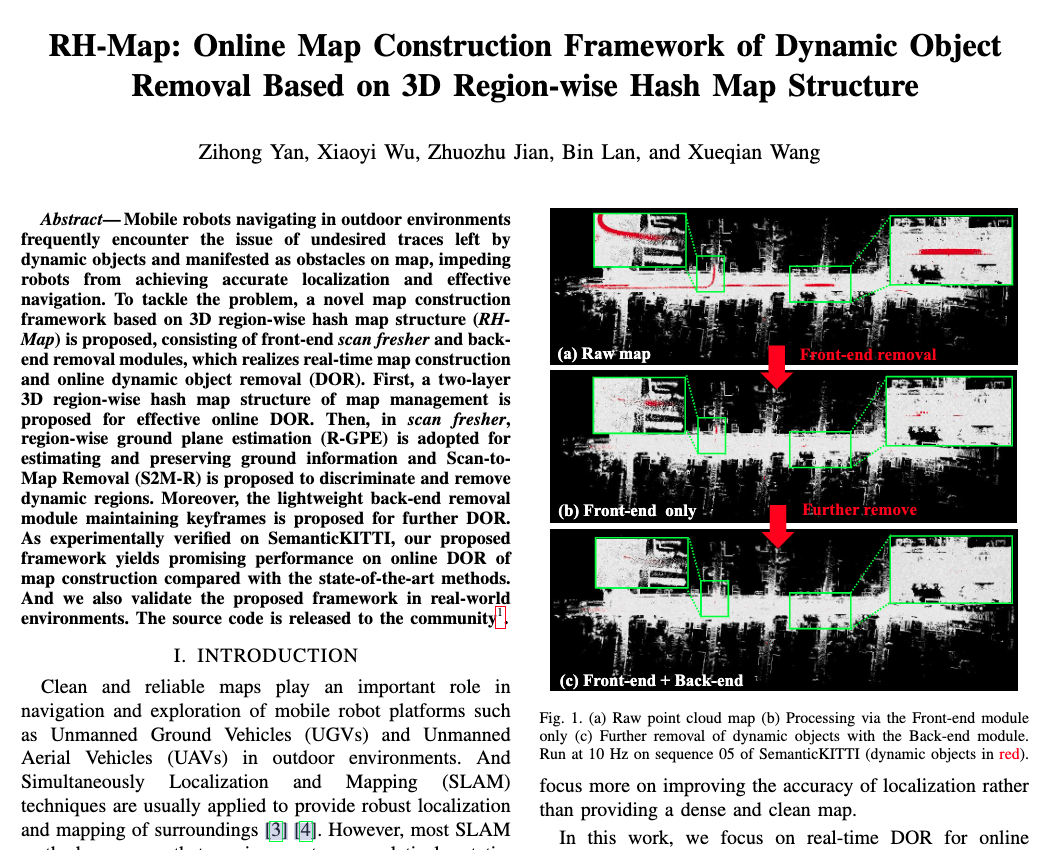
移动机器人在室外环境中导航经常遇到动态对象留下的不良痕迹问题,表现为地图上的障碍,阻碍了机器人实现精确定位和有效的导航。
为了解决这个问题,提出了一种新的基于三维区域哈希映射结构(RH-Map)的地图构建框架,该框架由前端扫描刷新器和后端去除模块组成,实现了实时地图构建和在线动态对象去除(dynamic object removal, DOR)。
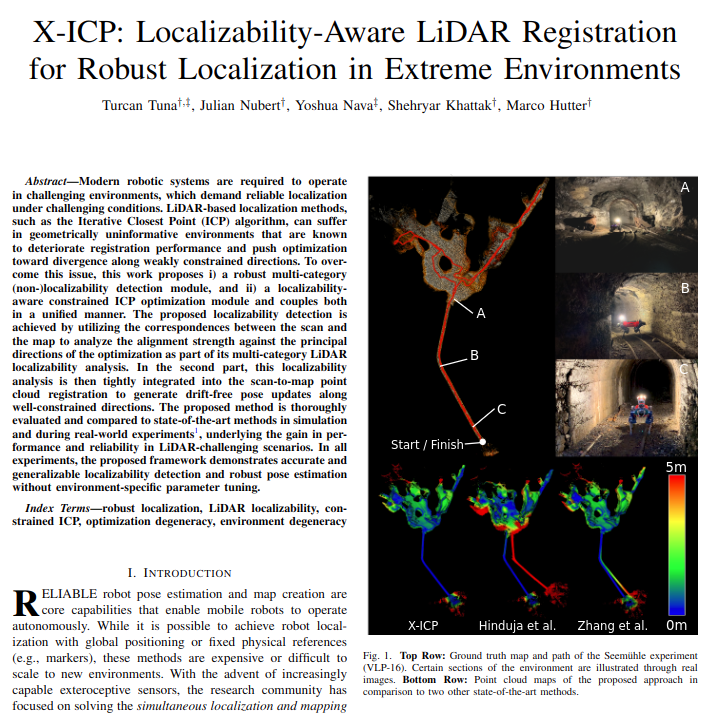
现代机器人系统需要在具有挑战性的环境中运行,这就要求在具有挑战性的条件下进行可靠的定位。基于激光雷达的定位方法,如迭代最近点(ICP)算法,在几何信息匮乏的环境中可能会受到影响,这些环境已知会降低配准性能,并将优化推向弱约束方向的发散
为了克服这个问题,本工作提出了 1)一个鲁棒的多类别(非)可定位性检测模块,以及 2)一个基于可定位性约束ICP优化模块,并以统一的方式将两者耦合在一起。所提出的可定位性检测是通过利用扫描和地图之间的对应关系来分析针对优化主方向的对准强度来实现的,作为LiDAR定位分析的一部分。
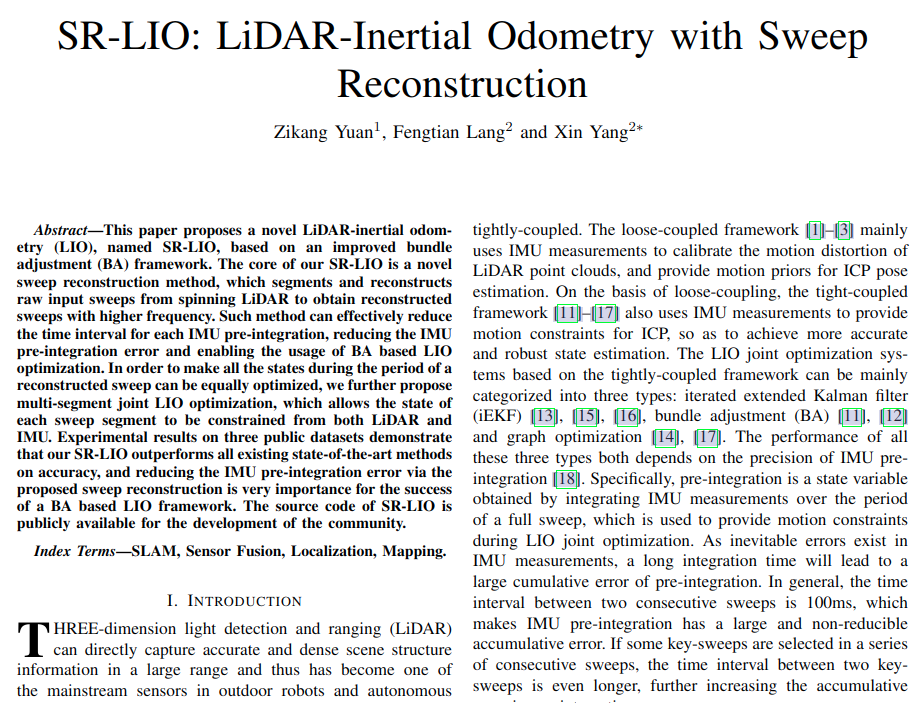
此论文所述的BA不是对激光多帧的BA,而是多传感器融合的最小二乘。