Catalogue
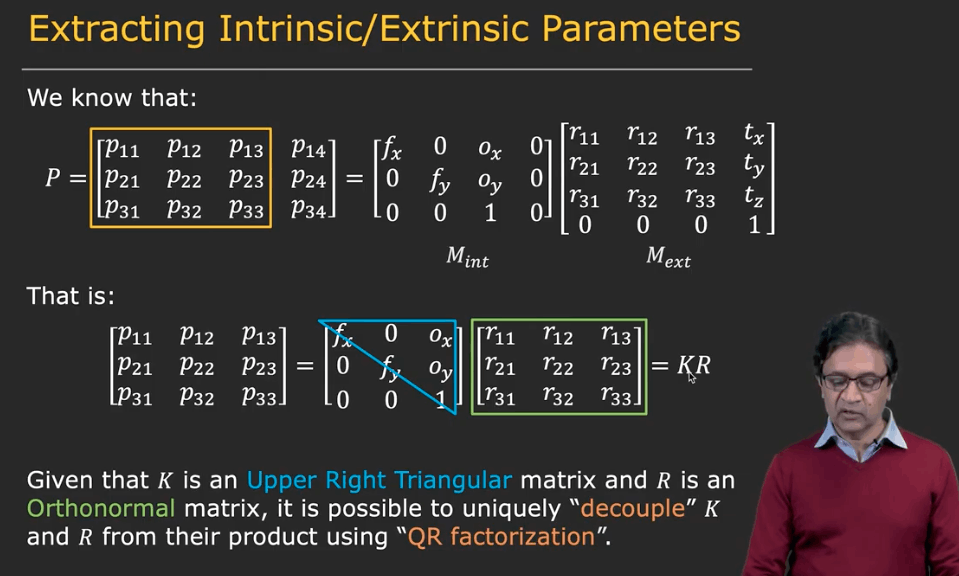
从投影矩阵提取内/外参矩阵
首先忽略齐次形式,重写成内参矩阵*旋转矩阵,
又因为:
- 内参矩阵是上三角矩阵
- 旋转矩阵是正交矩阵
- qr分解可以将矩阵分解为 [上三角矩阵]和[正交矩阵]
所以,对投影矩阵的前3x3个元素构成的子矩阵进行qr分解,就可以得到内参矩阵
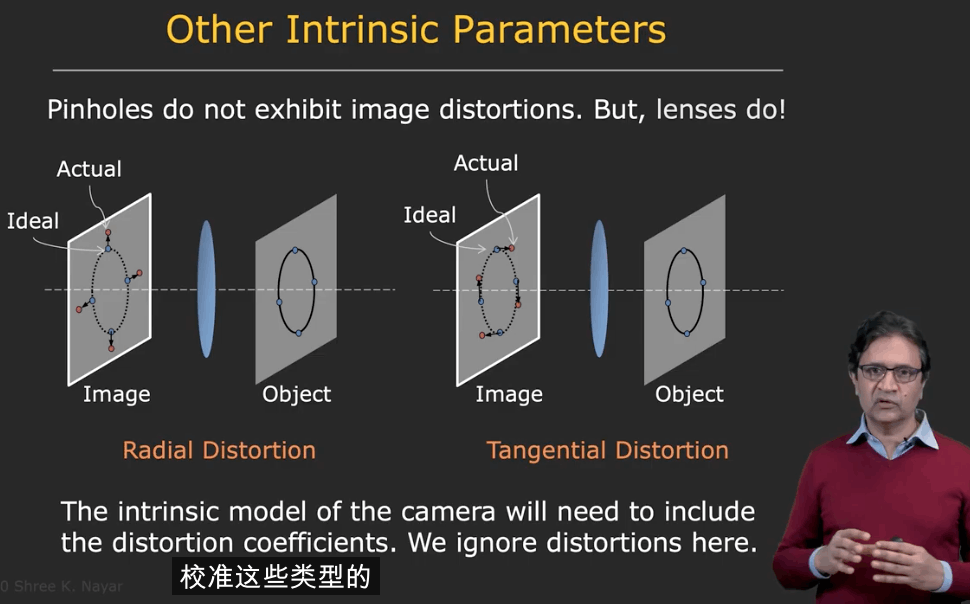
畸变的讨论(比较简略)
首先忽略齐次形式,重写成内参矩阵*旋转矩阵,
又因为:
所以,对投影矩阵的前3x3个元素构成的子矩阵进行qr分解,就可以得到内参矩阵