Catalogue
相机标定过程
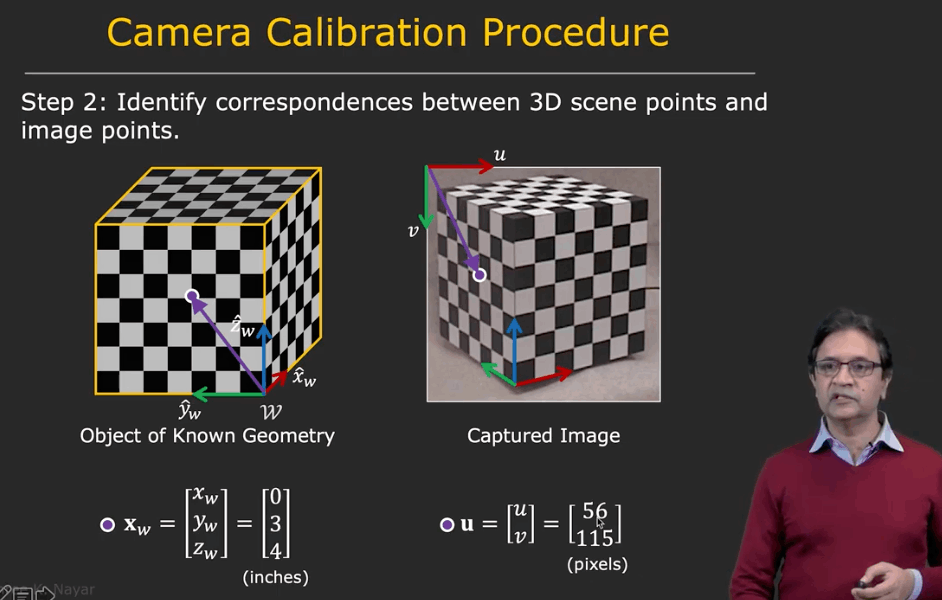
以立方体的一个角作为世界坐标系原点,相机拍摄图片,就可以得到一系列3D-2D关联。
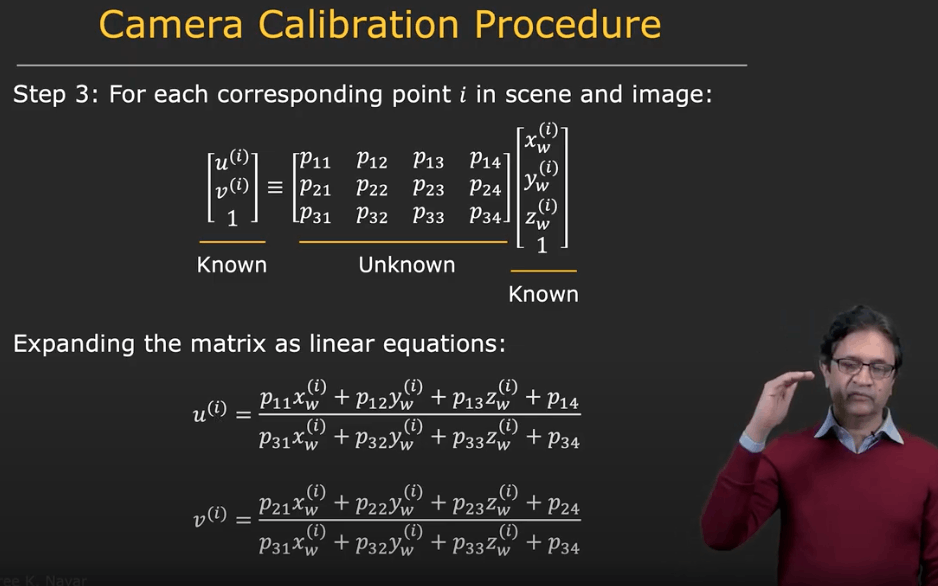
对投影模型展开,得到线性等式如下:
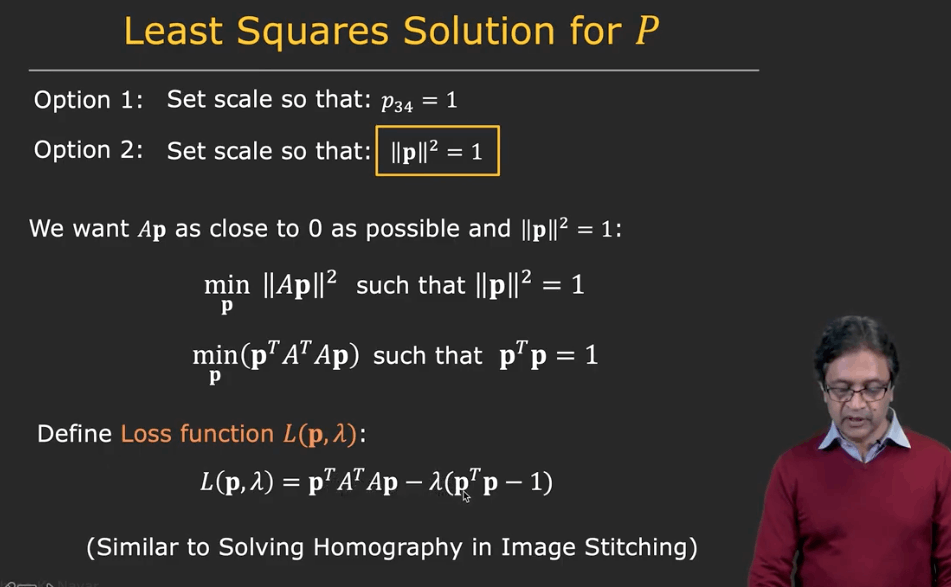
将矩阵中的12个参数作为向量,可以重写方程如下:

由于尺度不确定,所以通常有如下解决方法:
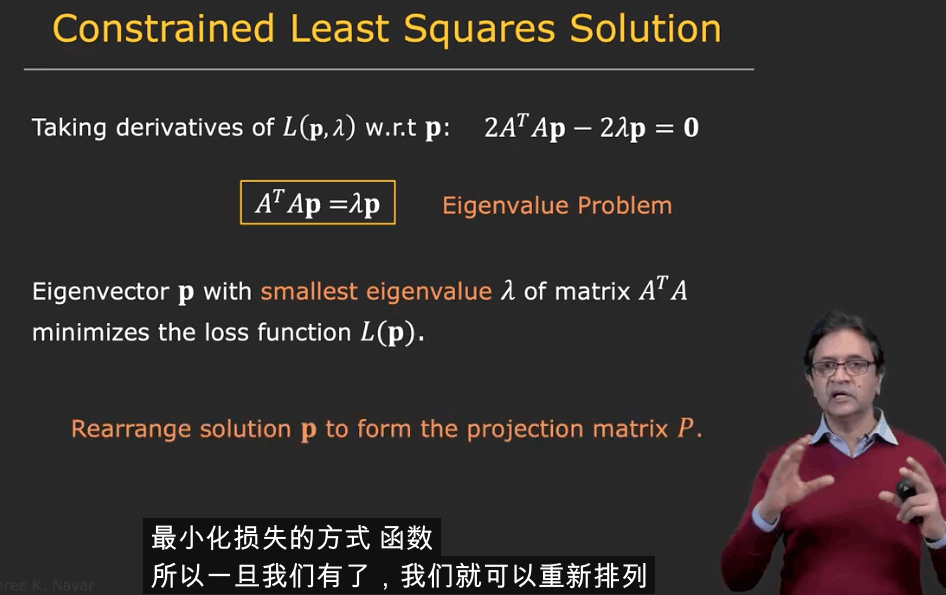
对上面的Loss func求导,可以得到一个关于特征值的问题,所以问题转化为求解矩阵\(A^TA\)最小特征值对应的特征向量,即