Catalogue
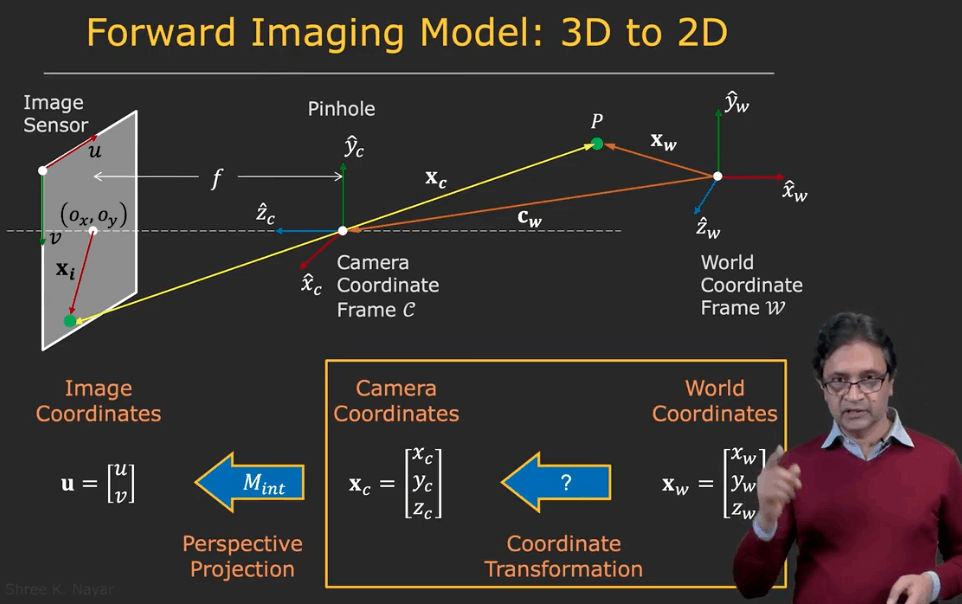
Forward Imaging Model: 3D to 2D
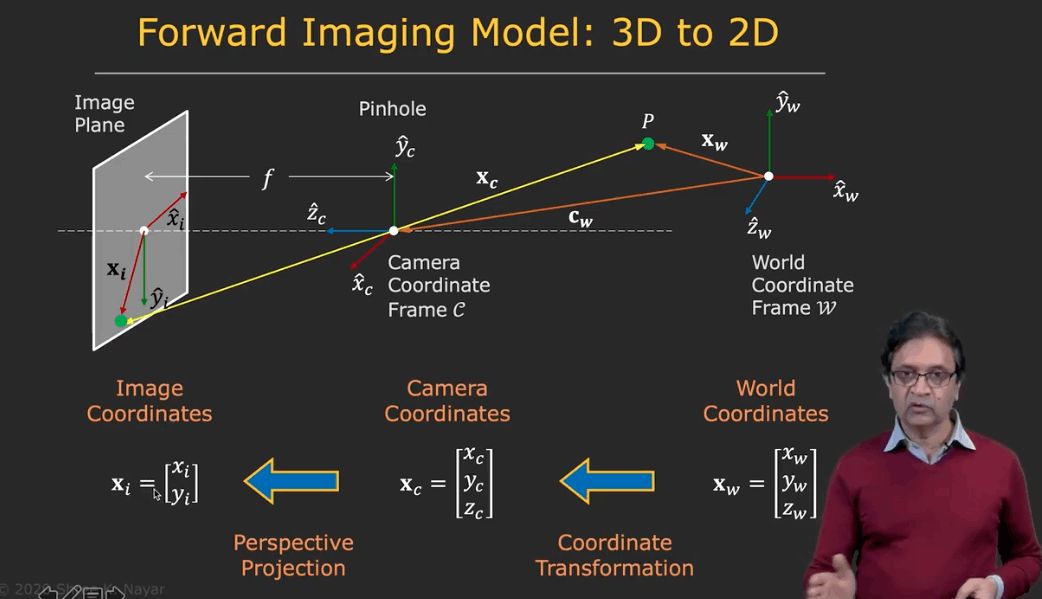
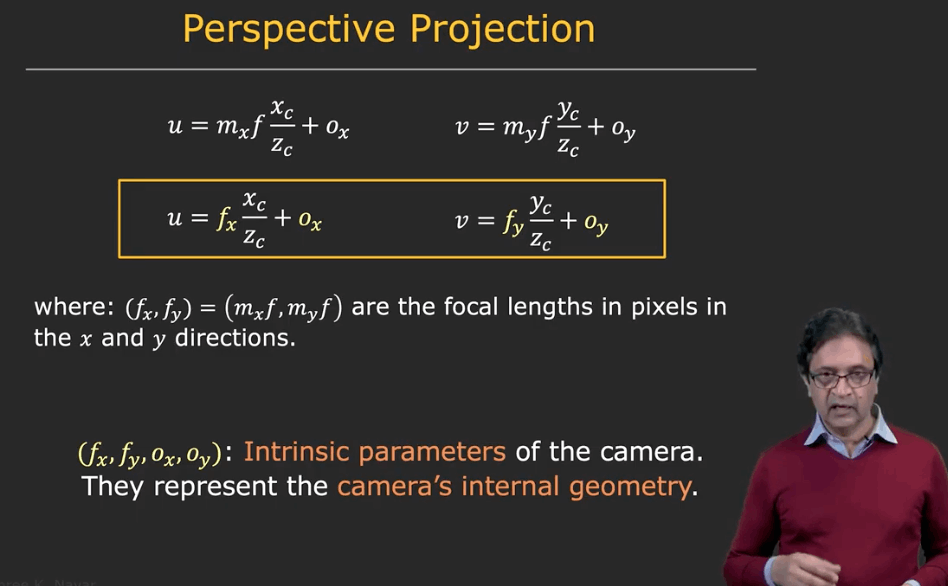
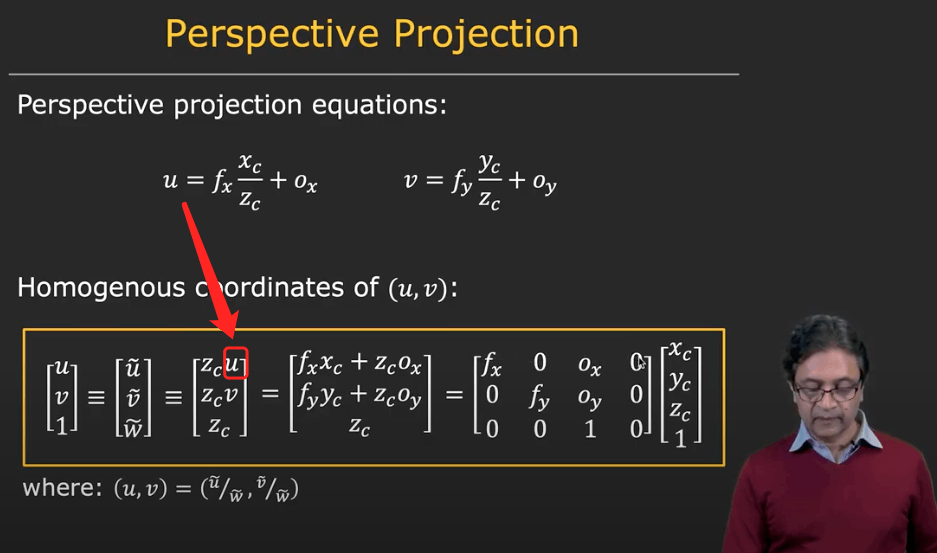
Perspective Projection

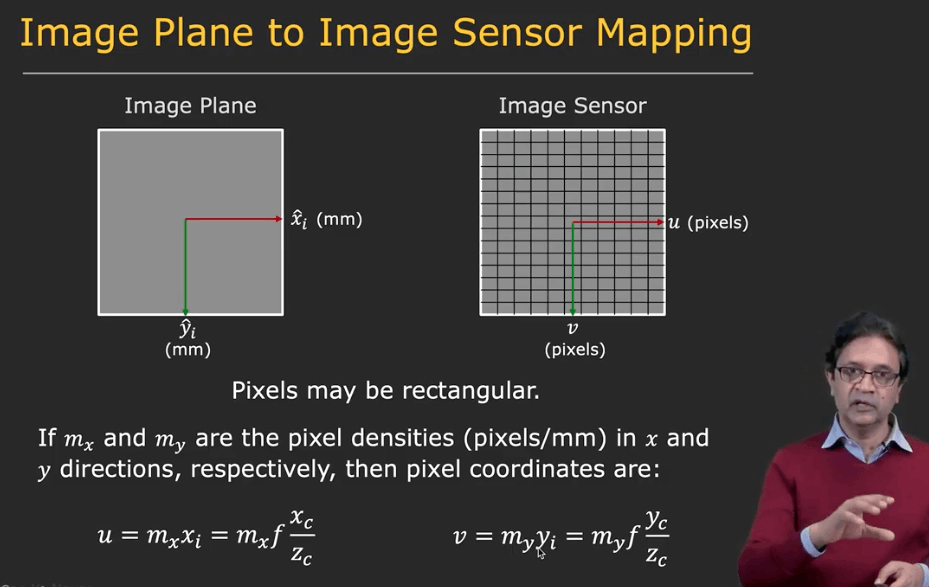
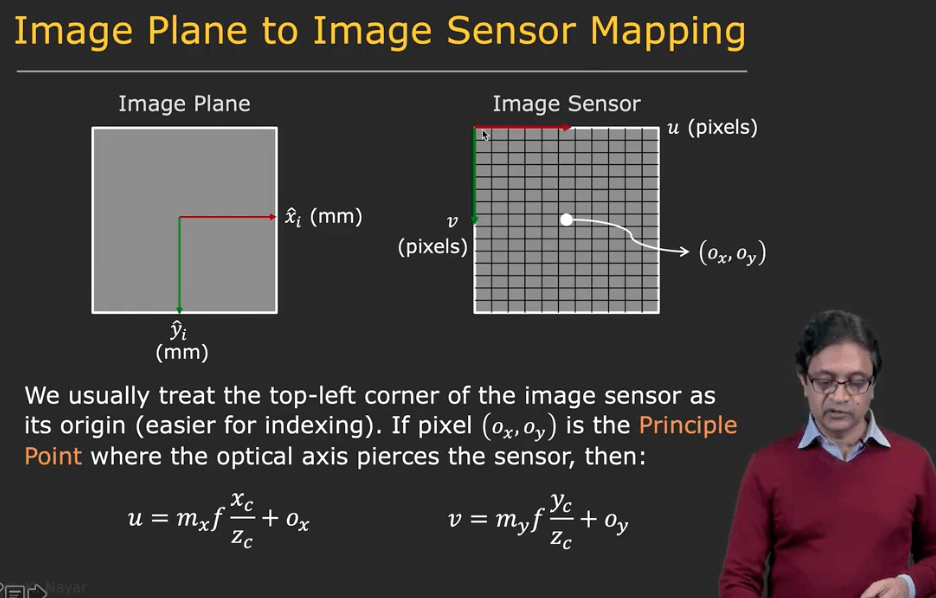
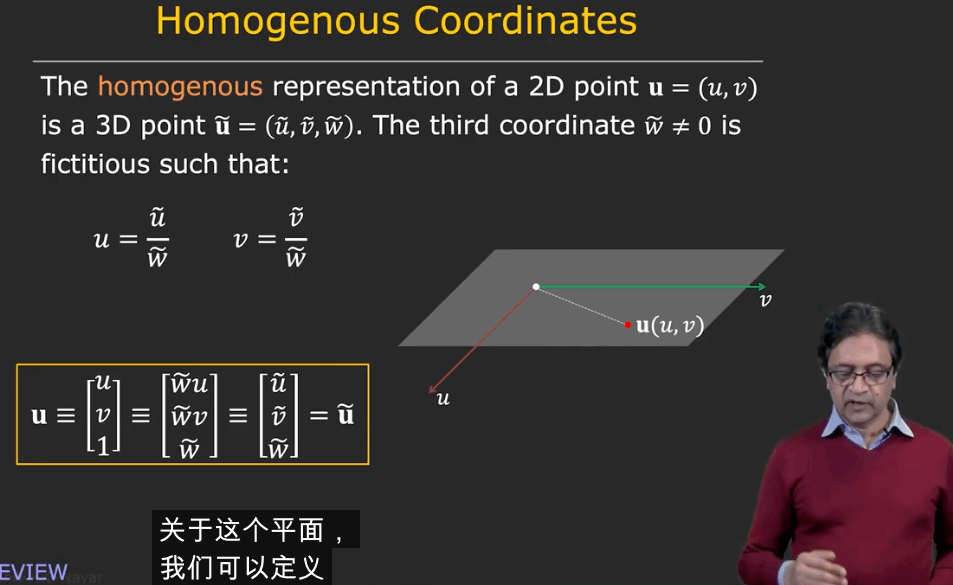
相机成像平面与图像的映射
点的齐次坐标表示
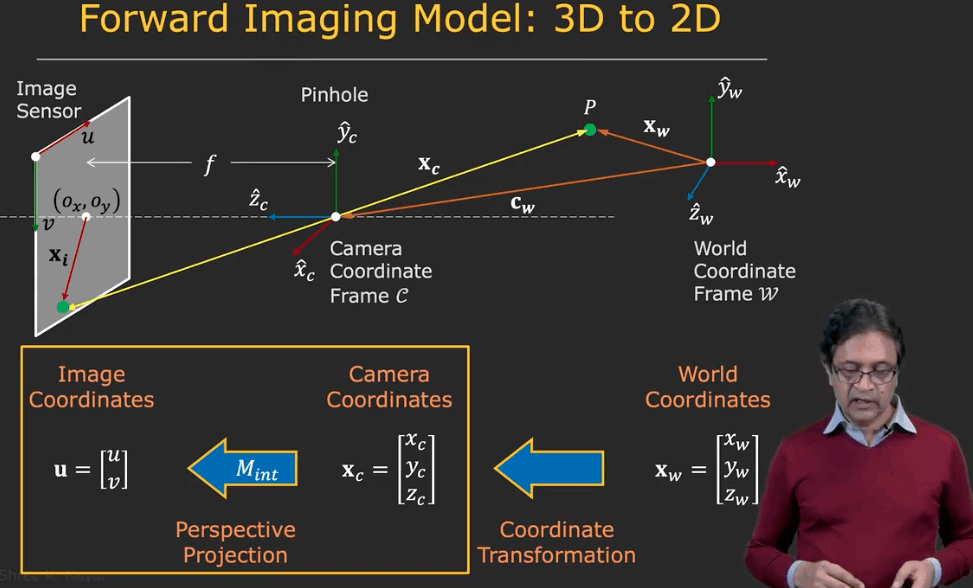
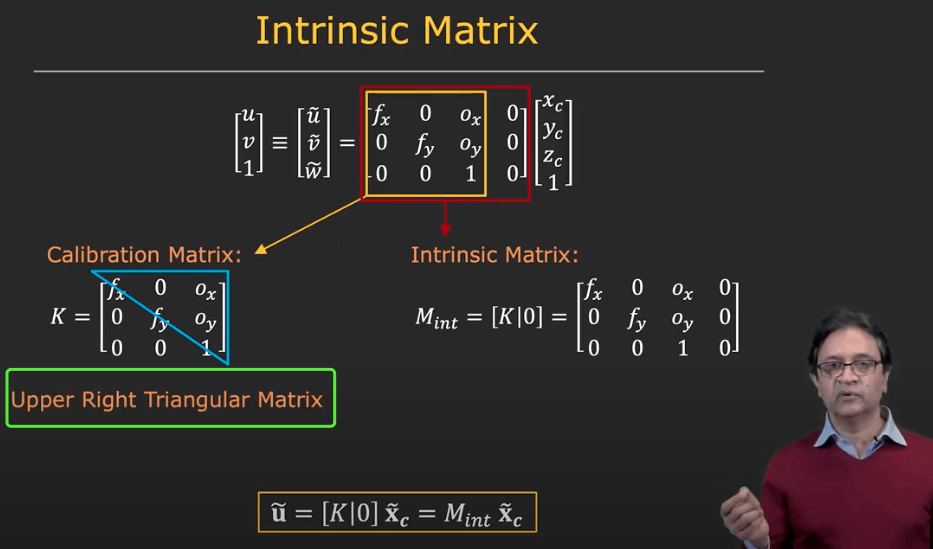
矩阵表示透视投影模型
坐标变换(外参)
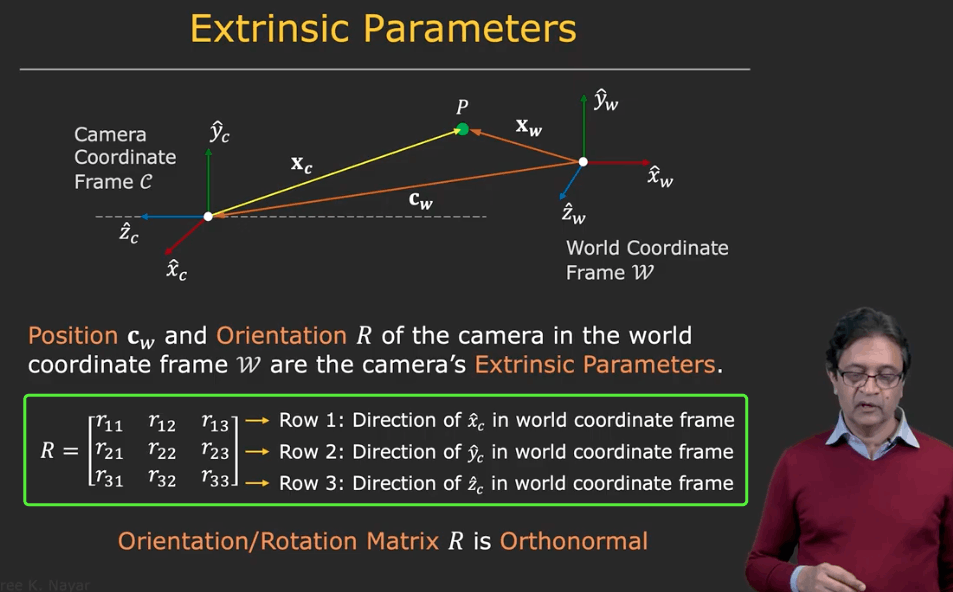
从世界坐标系到相机坐标系的旋转矩阵\(R\)的特性:
- 第一行: \(\hat{x}_c\)在世界坐标系的方向
- 第二行: \(\hat{y}_c\)的方向
- 第三行: \(\hat{z}_c\)的方向
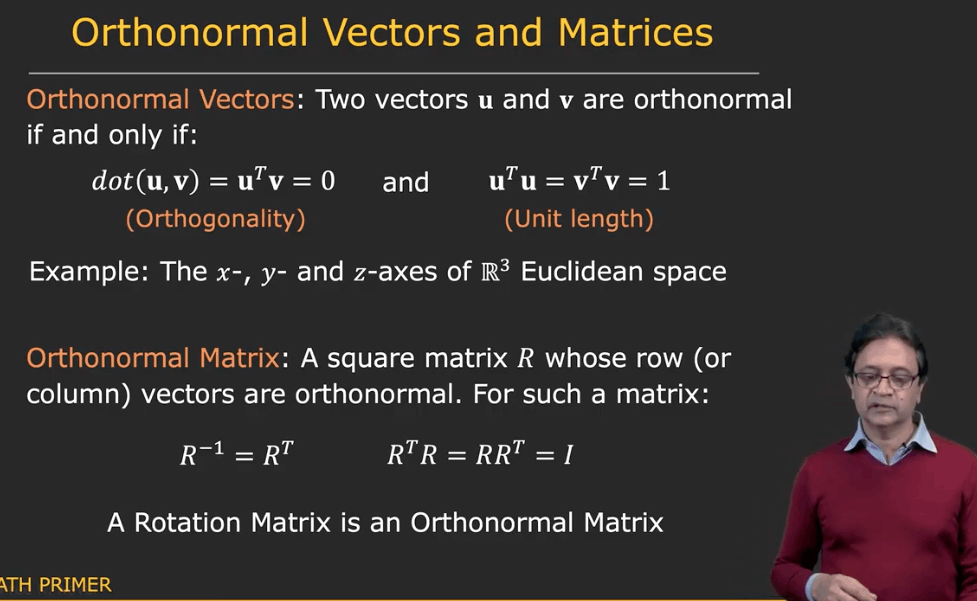
旋转矩阵是正交的,也就是说:
因此,当已知:
- 从世界坐标系到相机坐标系的旋转矩阵\(R\)
- 相机坐标系在世界坐标系的位移\(c_w\)
就可以将一个点从世界坐标系变换到相机坐标系如下:

使用齐次表达如下:
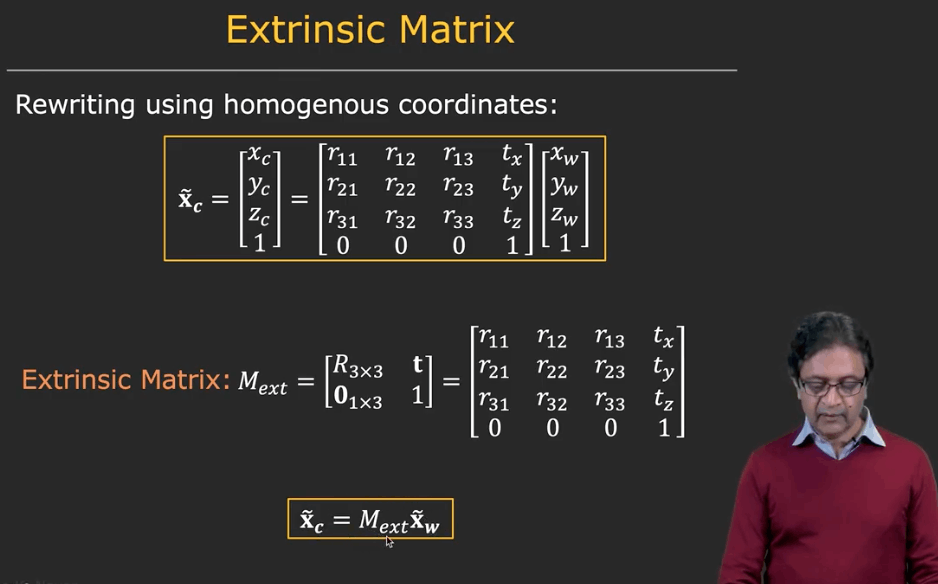
两个过程合起来的表示
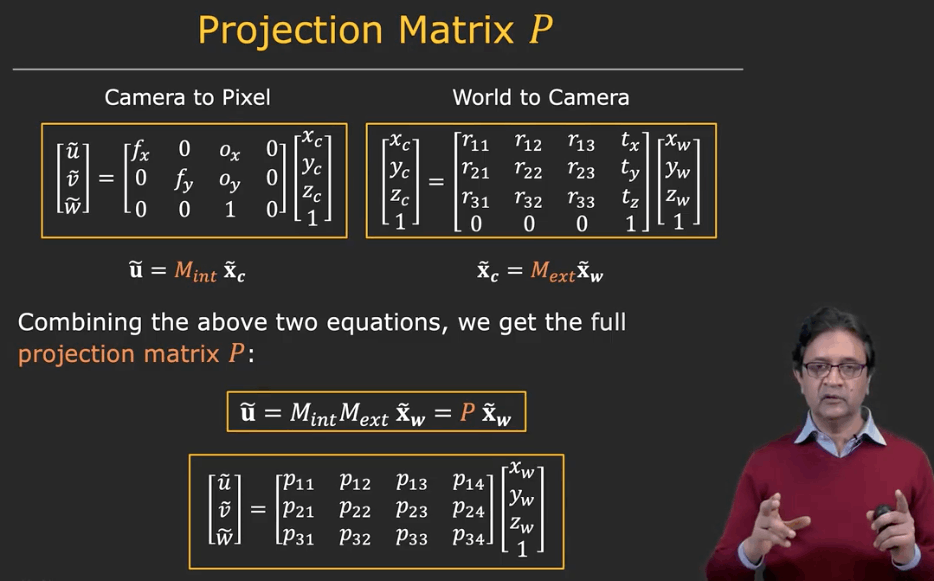
标定相机,就是求解矩阵的12个元素