LT-mapper: A Modular Framework for LiDAR-based Lifelong Mapping

摘要
本文开发了一个开源的、模块化的、现成的、基于lidar的城市站点lifelong mapping
这是通过将问题划分为连续的子问题来实现的:
- multi-session SLAM (MSS) - high/low dynamic change detection - positive/negative change management
所提出的方法利用MSS,并处理潜在的轨迹误差,因此,change检测不需要良好的初始对齐,我们的change管理方案保留了内存和计算成本的有效性,提供了从大规模点云图中自动分离对象的功能。通过对多个时间间隔(从一天到一年)的广泛实际实验,我们验证了该框架的可靠性和适用性,甚至在永久的年水平变化。
介绍
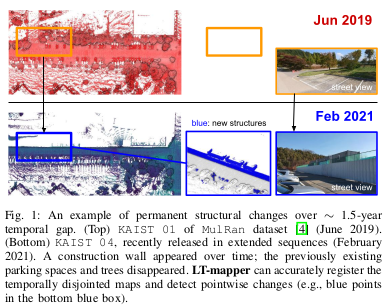
环境的变化如图1所示
为了更好地处理这种变化,lifelong mapping必须通过检测、更新和管理环境变化来解决自治的建图维护[1]
1)Integration to multi-session SLAM for scalability:一些研究认为,变化检测是比较多个预先构建的地图与时间上遥远和独立的后处理过程。在这项工作中,我们集成了多会话SLAM (MSS),并将会话与锚节点[2]对齐,以在大型城市环境中执行变化检测,而不是在一个小房间,我们的框架包括一个基于激光雷达的多会话三维同步定位和映射(SLAM)模块,称为LT-SLAM。
2)Change detection under SLAM error:如果地图完全对齐,那么两个地图之间的变化检测就不重要了,早期的地图变化检测工作[5,3,6,7]依赖于全局对齐地图的强假设,没有错误,避免了处理这种模糊性问题。不幸的是,轨迹误差在现实中不可避免地发生。我们在变更检测期间调和了这种潜在的不对准,并使所提出的方法能够稳健地处理潜在的对准误差。为了处理模糊性,我们提出了一种具有投射可见性的scan-to-map方案,使用多个窗口大小的range-image,称为LT-removert
3)Compact place management:除了变更检测之外,我们还提出并证明了变更组合的概念,一旦检测到更改,就应该遵循地图维护的决定,以确定包含或排除什么,利用这一特性,我们不仅可以维护现有作品[1,3]等最新的地图,还可以提取具有较高placeness的稳定结构。因此,我们构建了一个可靠的3D地图,具有真正有意义的结构,用于其他任务,如跨模式定位[9]和长期定位[10]。这个最后的模块,称为LT-map.
总结,提出了一个新颖的基于激光雷达的lifelong mapping,称为LT-mapper. 框架中的每一个模块都可独立运行,基于file-based i/o 协议。与最近(但部分)提供的基于视觉的方法不同的是,3D LiDAR几乎没有实现统一和模块化的终身映射[11,12,13,14,15]。据我们所知,LT-mapper是第一个开放的模块化框架,支持基于lidar的复杂城市站点终身绘图,本文主要贡献:
- LT-SLAM 集成变化检测MSS,通过anchor node来解决会话恢复,只使用激光雷达在共享帧中缝合多个会话。 - LT-removert 利用时空轴上的remove-then-revert算法,克服了会话间的对齐模糊性。 - LT-map 能有效地生成最新地图(实时地图)和持久地图(元地图),同时将更改存储为增量地图,通过增量建图,减少内存和储存的成本。
相关工作
概述
LT-mapper是完全模块化的,并支持上述三个功能。整个pipline有3个模块组成(图3),顺序运行并且模块独立。不像现有的基于激光雷达的变化检测[21],装备有昂贵的定位设备,我们的系统只需要一个激光雷达(可选的IMU)。

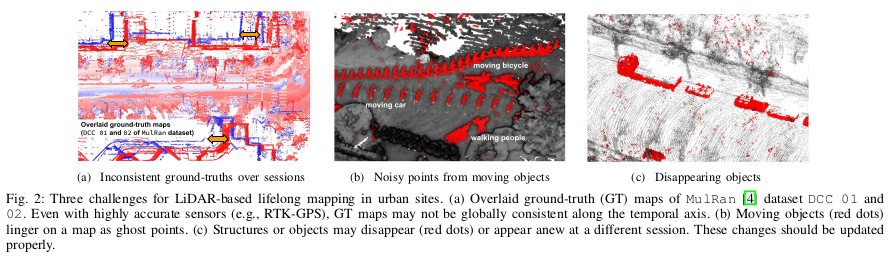
在真实的户外环境中,暂时不连接的场景之间的准确对齐是难以捉摸的,如图2(a)所示
在LT-SLAM模块中,我们利用多会话SLAM,联合优化多个会话,并使用基于lidar的全局定位器进行鲁棒的会话间闭环检测,在这个模块中,一个查询度量被配准到现有的中心地图中。
我们同样需要考虑观测的变化,如图2(b),一个构建的点云图可能包含噪声,由于周围的运动物体(红点),即使是精确的里程表。这些不稳定的物体对一个地方的显著性的贡献不如静止点,因此,在LT-removert模块中,这些高动态(HD)点应该在计算会话间差异之前预先删除。
在对齐查询帧和中心会话并移除高清点后,我们通过应用查询测量和中心地图之间的差分操作来检测变化,如图2(c)。我们称之为低动态变化(LD),进一步分为新出现点(PD)和消失点(ND)两类。