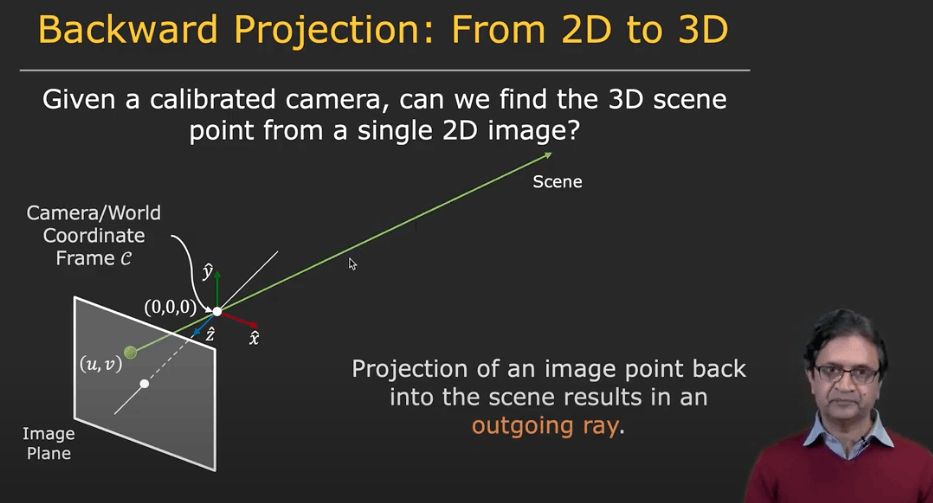
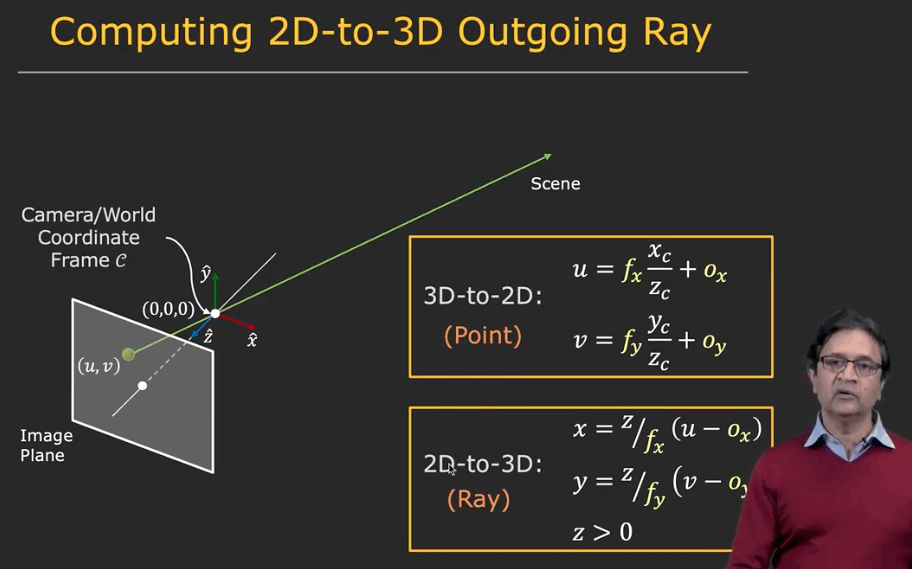
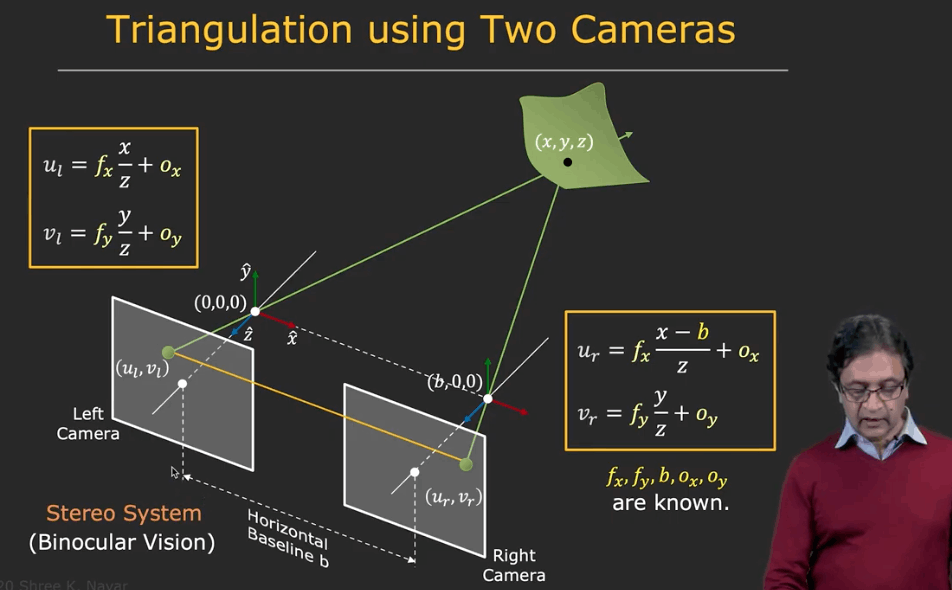
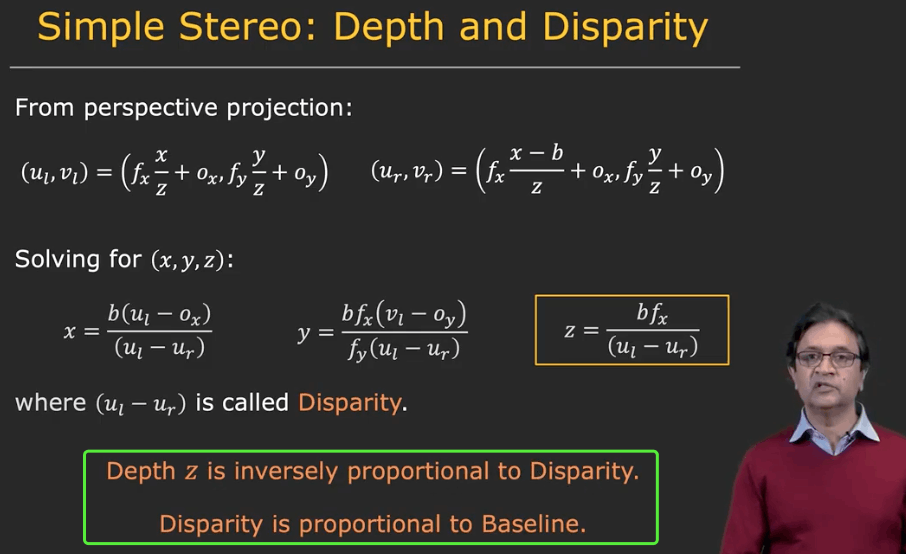
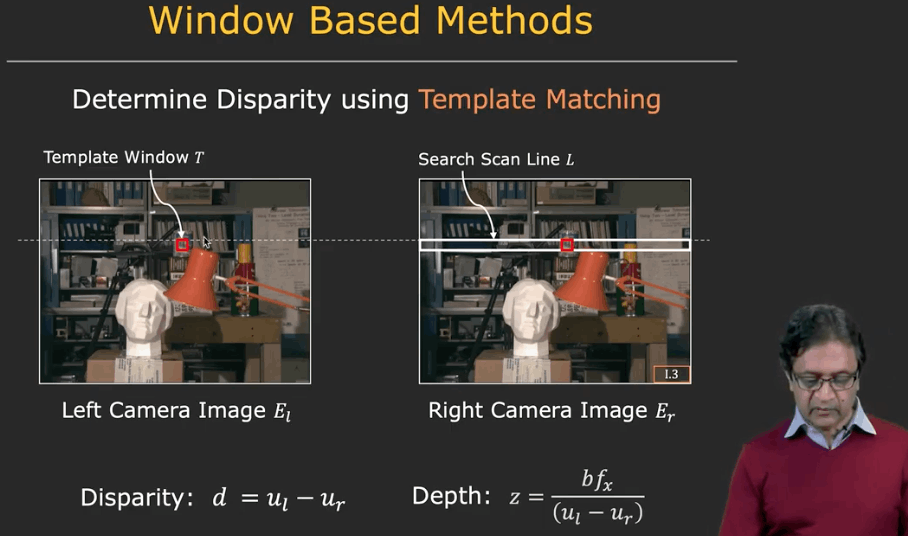
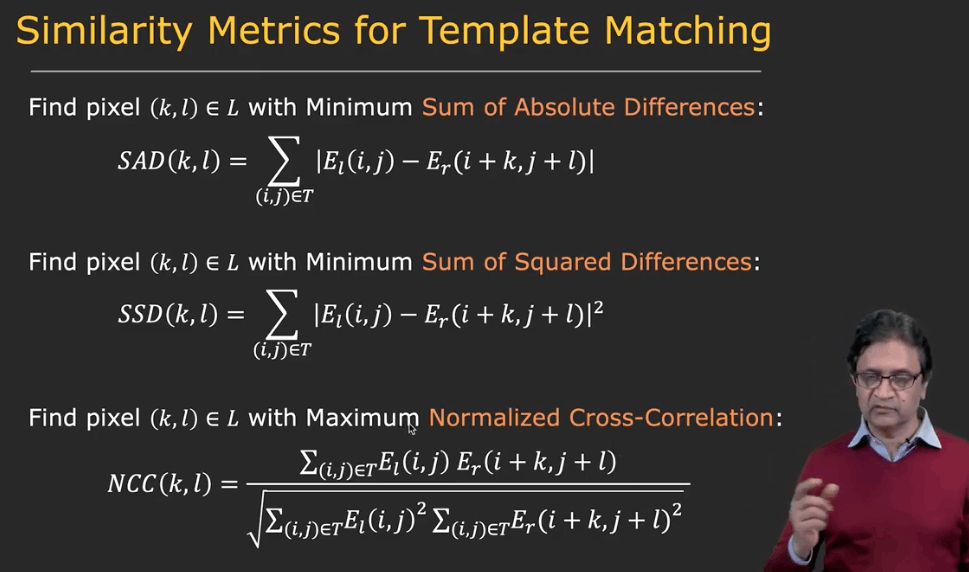
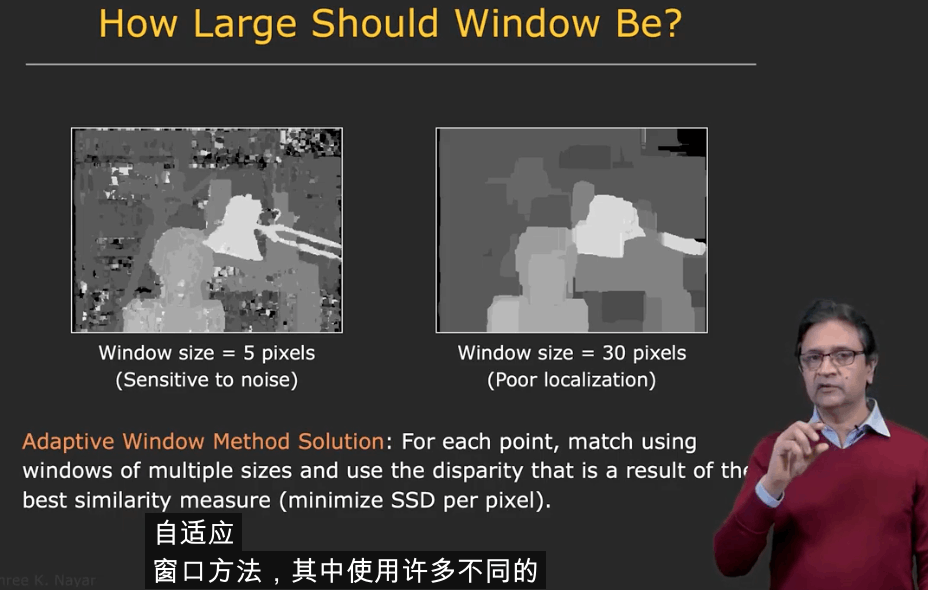
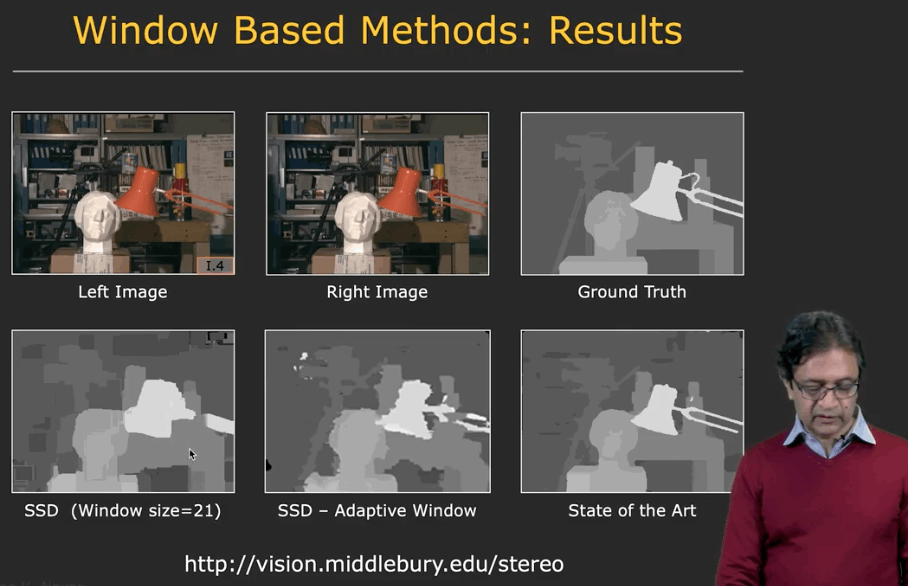
First_Principles_of_CV SLAM 2021-08-08 Source Edit History 相机标定|简单立体相机 Catalogue 1. Backward Projection: 2D to 3D2. 双目3. 立体匹配(寻找视差) Backward Projection: 2D to 3D 假设给定一个标定好的相机,如何从2D图像恢复3D点? 双目 深度与视差成反比 深度与基线成正比 基线越大,精度越高 立体匹配(寻找视差)