Catalogue
LiTAMIN: LiDAR-based Tracking And MappINg by Stabilized ICP for Geometry Approximation with Normal Distributions

摘要
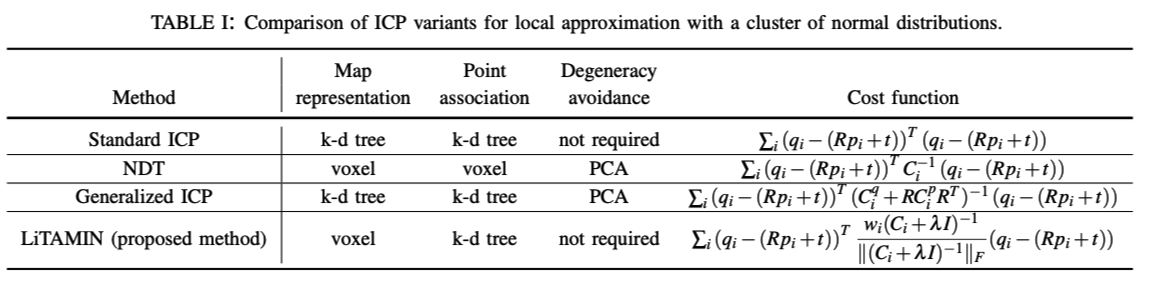
提出一种3D SLAM方法,采用一种使用正态分布集群来局部近似几何体的icp算法,与基于正太分布的icp,GICP等方法相比,提出的icp方法通过使用\(Frobenius\)范数以及正规化的协方差矩阵简单地稳定了cost func的规范形式。
过去的方法使用pca来进行stabilize,其计算成本高于提出的方法,并且,提出的slam方法可以减少错误的闭环带来的影响.
提出的icp
在SLAM系统中,这需要实时处理,ICP方法必须平衡精度和鲁棒性以获得计算效率, 减少3D点的数量是提高计算效率最有效的解决方案之一。任何基于ICP的SLAM系统[9],[17] - [20]经常使用具有体素网格和正常分布的ICP方法,因为它们可以降低计算成本,同时仍然保持足够的几何信息。 其中,NDT [17]和GICP [9]是最流行的方法
地图表示和点关联
Voxel网格或K-D树用于地图表示和关联搜索,Voxel网格表示具有计算效率的优势,因为体素数量明显低于原始点云中的点数.
关于相应点查找方面,K-D树表示可以找到具有最近邻居(NN)搜索的关联点,而Voxel网格表示没有保证NN搜索
关于计算成本方面,voxel具有优势,计算成本是O(n);而k-d树是O(n log n )
提出的LiTAMIN系统结合两种方式,使用voxel 滤波器来减少点数,每个voxel代表一个点,该点表示voxel的质心, 地图也采用voxel来表示,用于减少点数并看起来密度更加均匀。
Cost func 和 退化情况避免
LITAMIN采用了一个由正态分布近似局部几何的ICP,应该应对协方差矩阵的退化关系, 如果局部几何形状是平面,则协方差矩阵的最小特征值为0或极小 ,