Catalogue
惯性导航基础
惯导误差分析
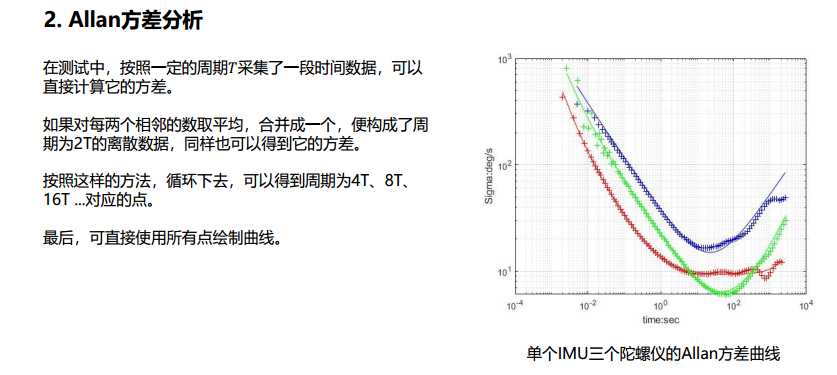
Allan方差
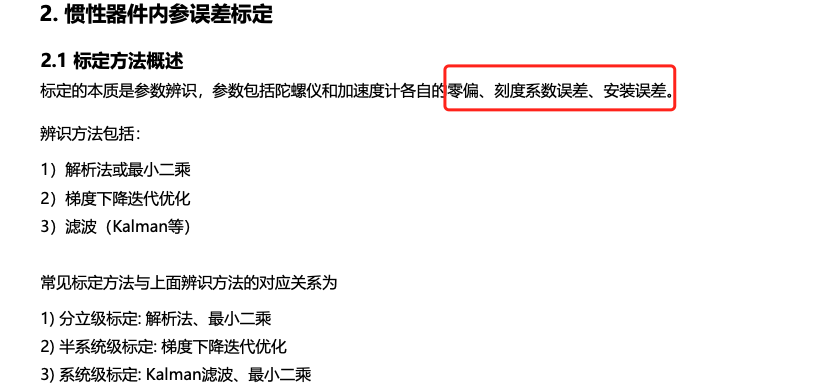
惯性器件内参标定
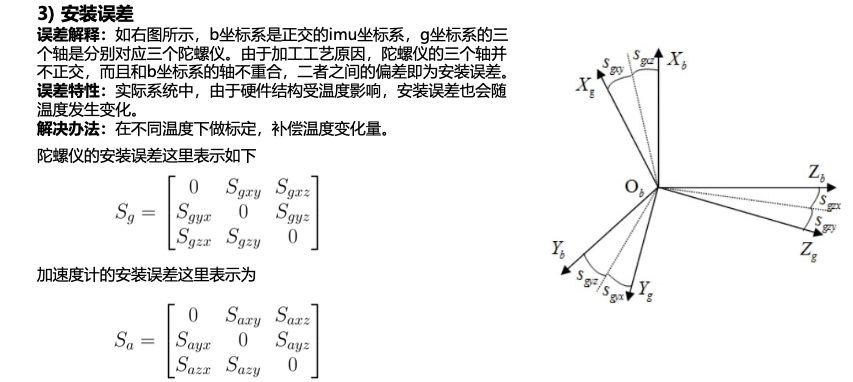
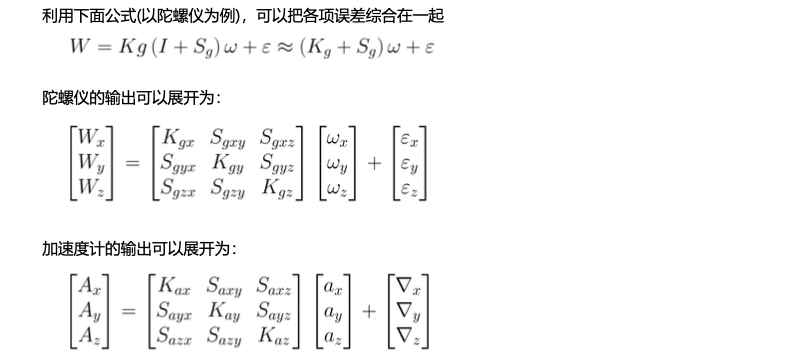
内参误差模型
标定方法
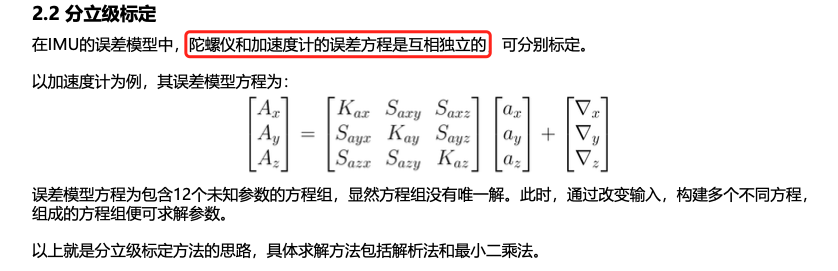
分立级标定
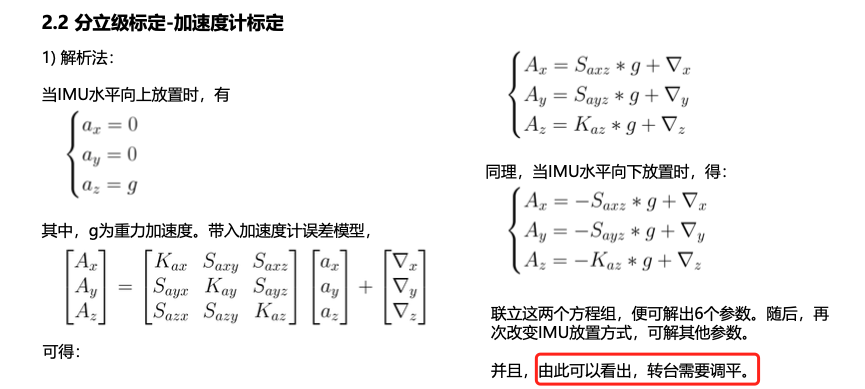
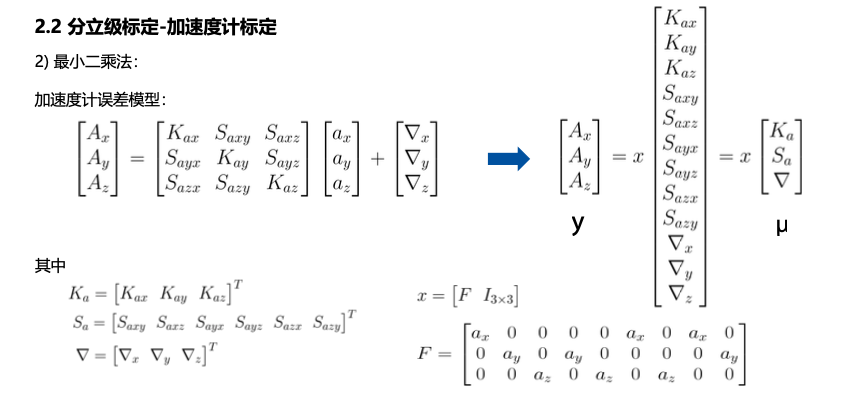
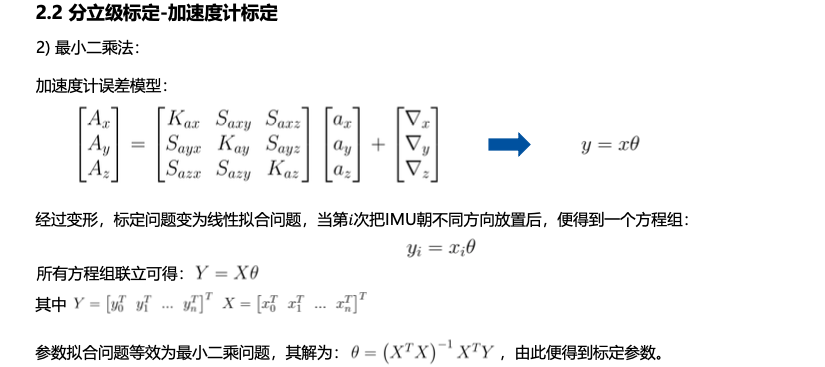
加速度计标定
分立级:各个部分分开标定,系统级标定:使用一个模型进行全部参数的标定
其中,
- \((a_x,a_y,a_z)\)为真实值
- \((A_x,A_y,A_z)\)为imu输出值

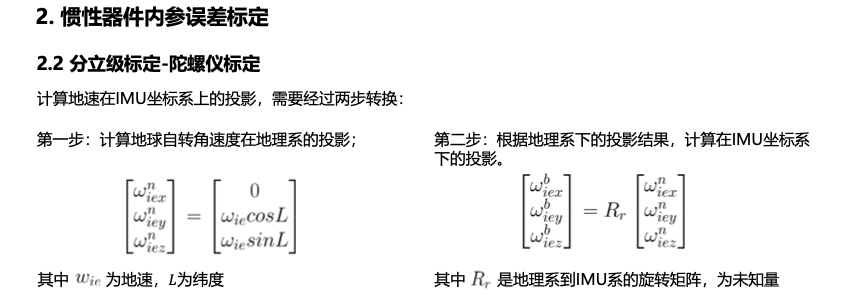
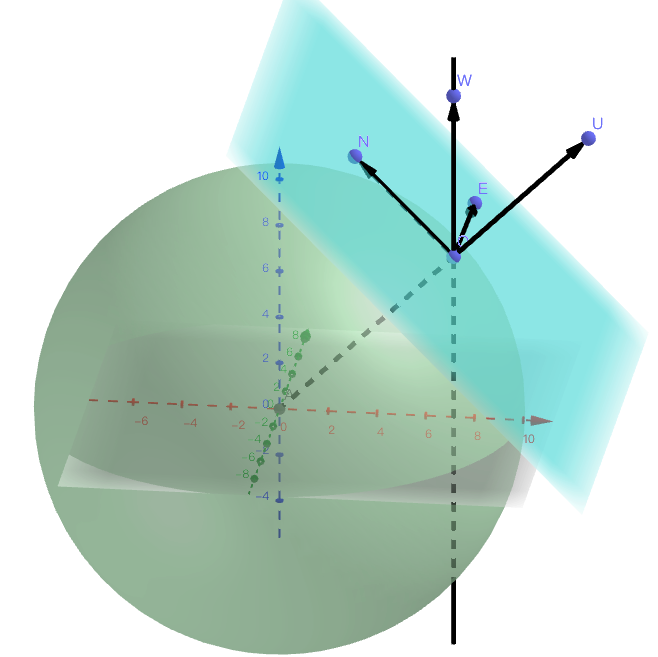
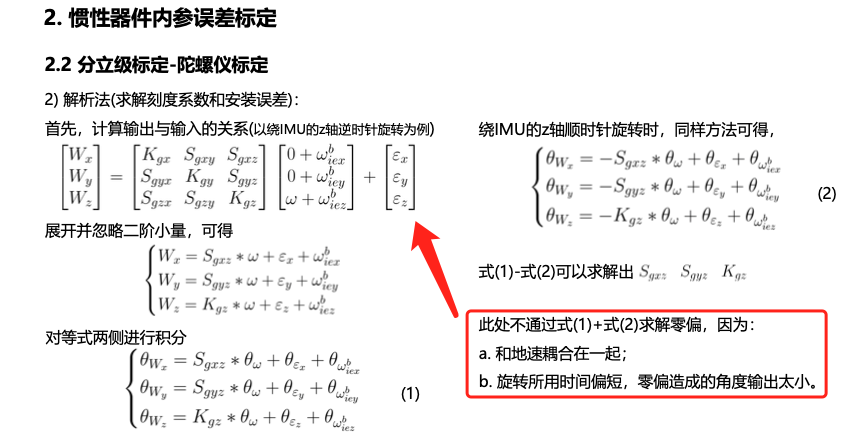
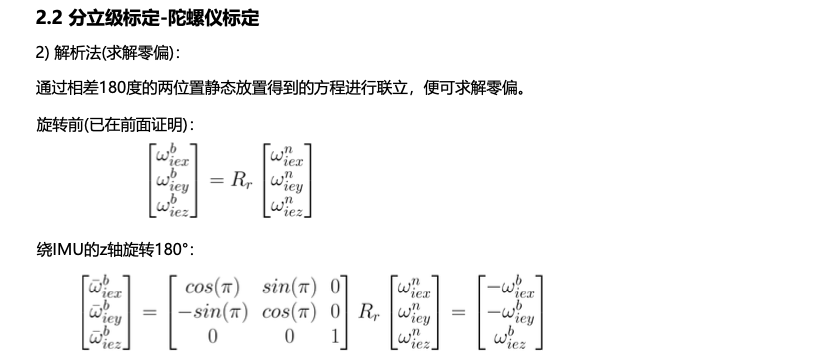
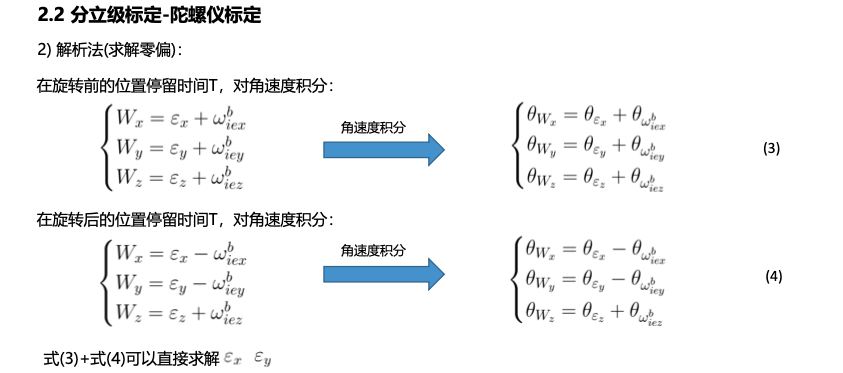
陀螺仪标定
补充内容: 角速度定义: - 角速度ω是矢量。按右手螺旋定则,大拇指方向为ω方向。当质点作逆时针旋转时,ω向上;作顺时针旋转时,ω向下。
其中,
- 上图中的\(w\)轴表示地球自转角速度矢量的方向
主要原因:转台旋转的时候,本来就有误差,如果使用信噪比来评价,信:指由零偏积分造成的误差,也就是我们要求解的,噪:指转台的误差,这个时候,信噪比其实并不大。
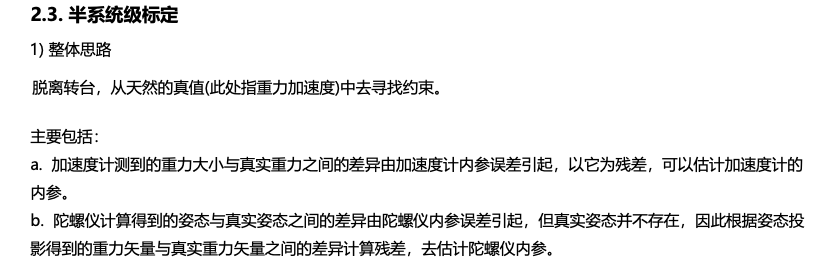
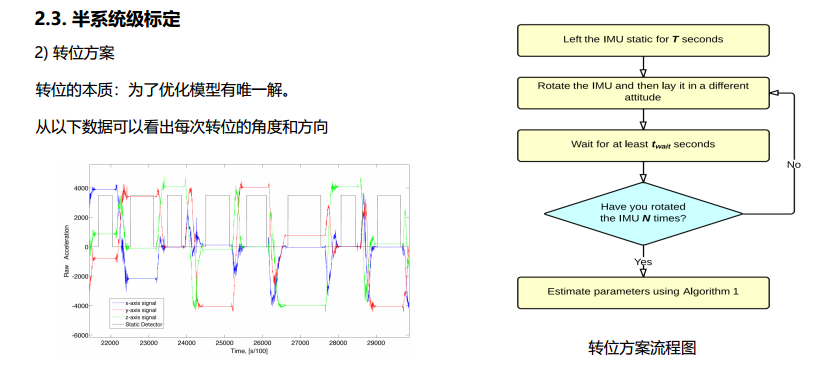
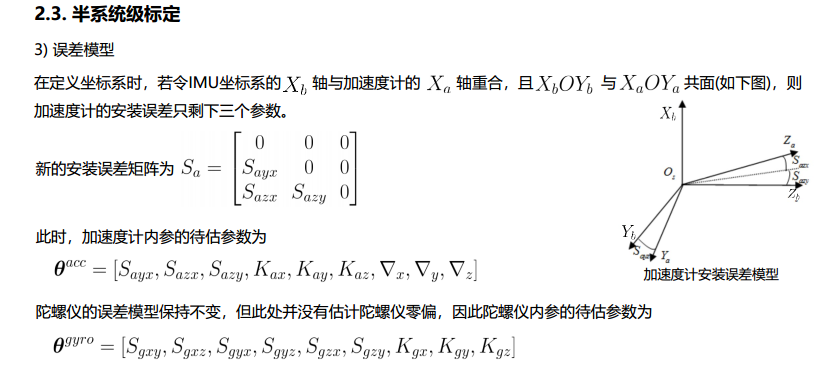
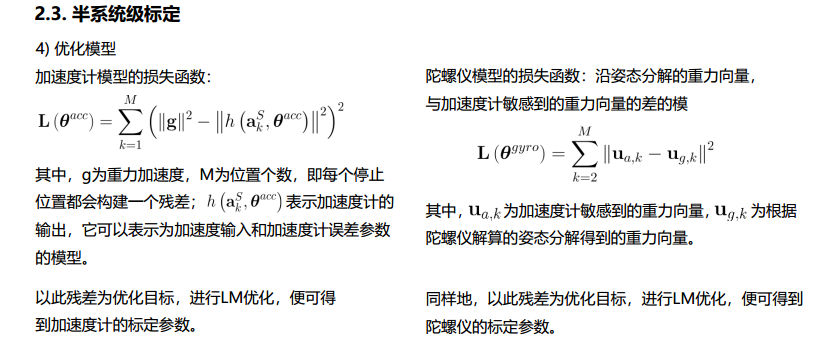
半系统级标定

惯性器件温差补偿