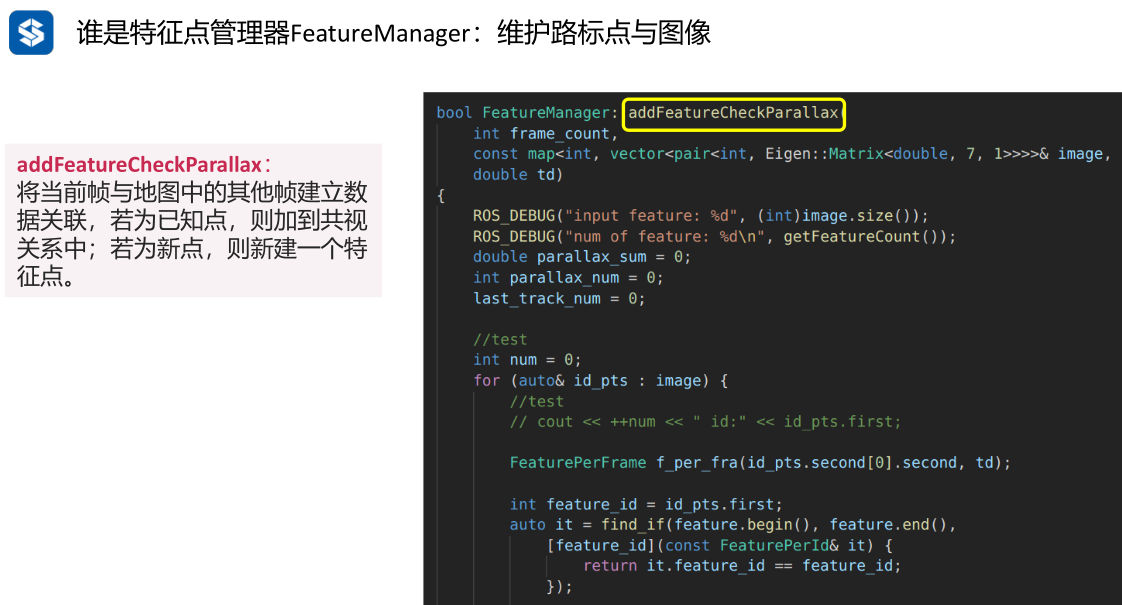
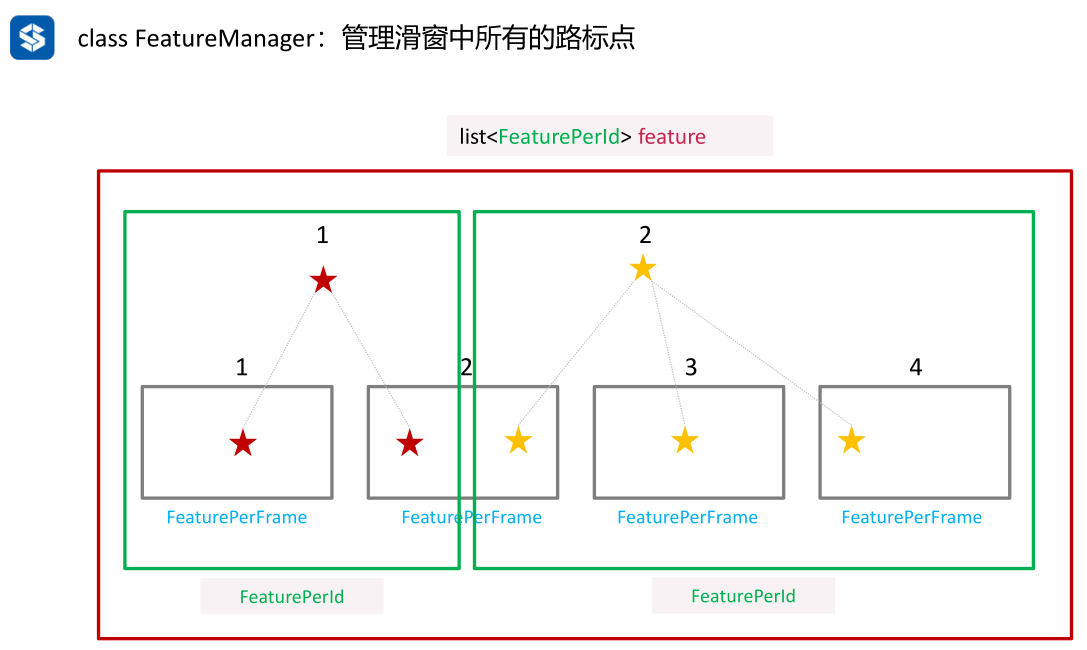
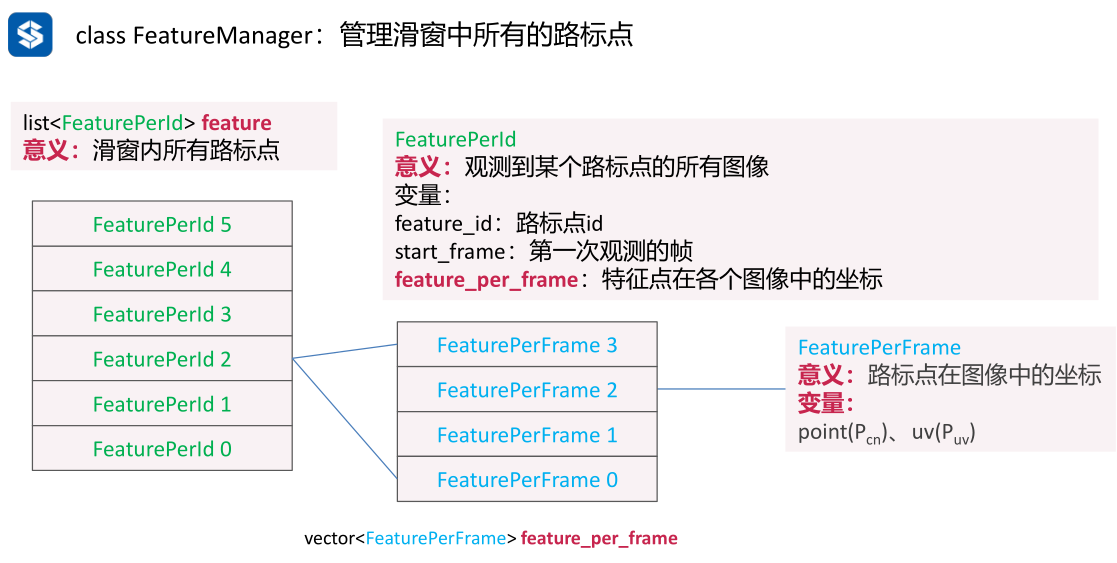
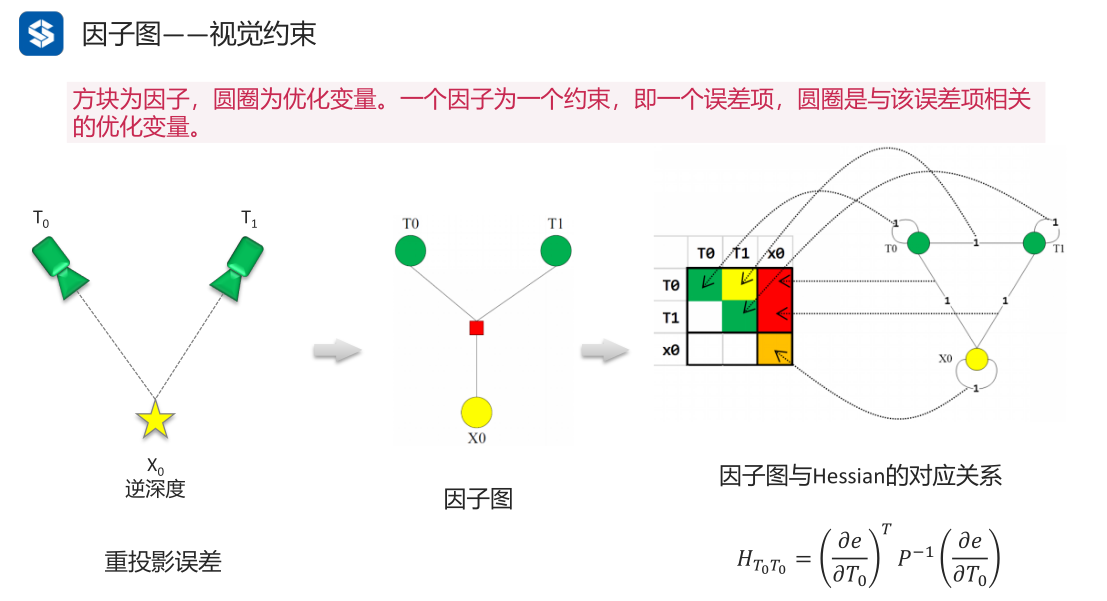
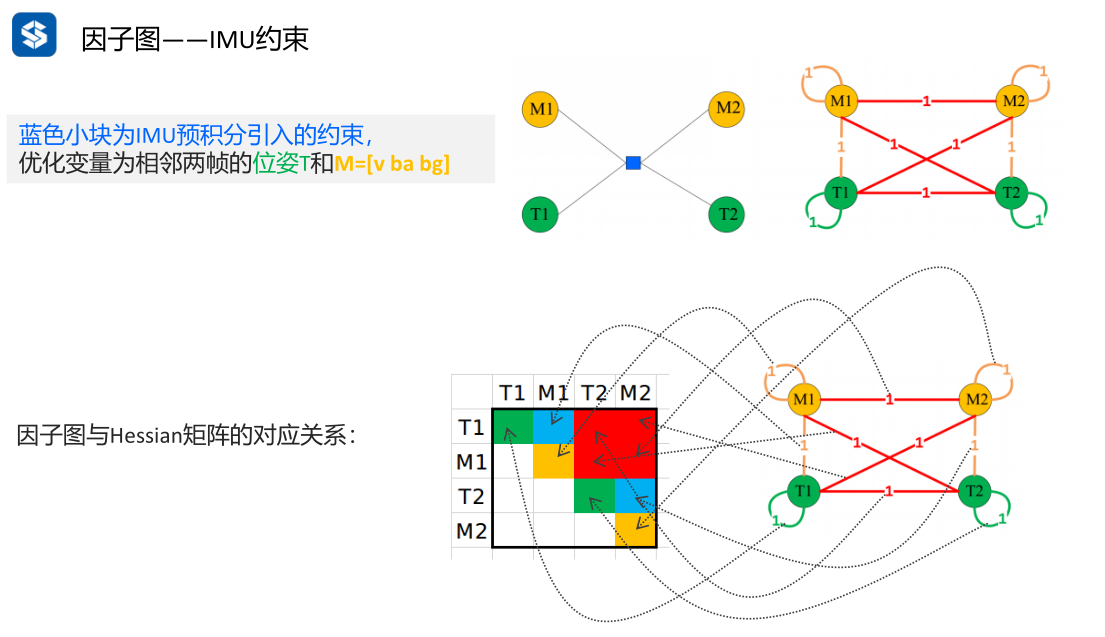
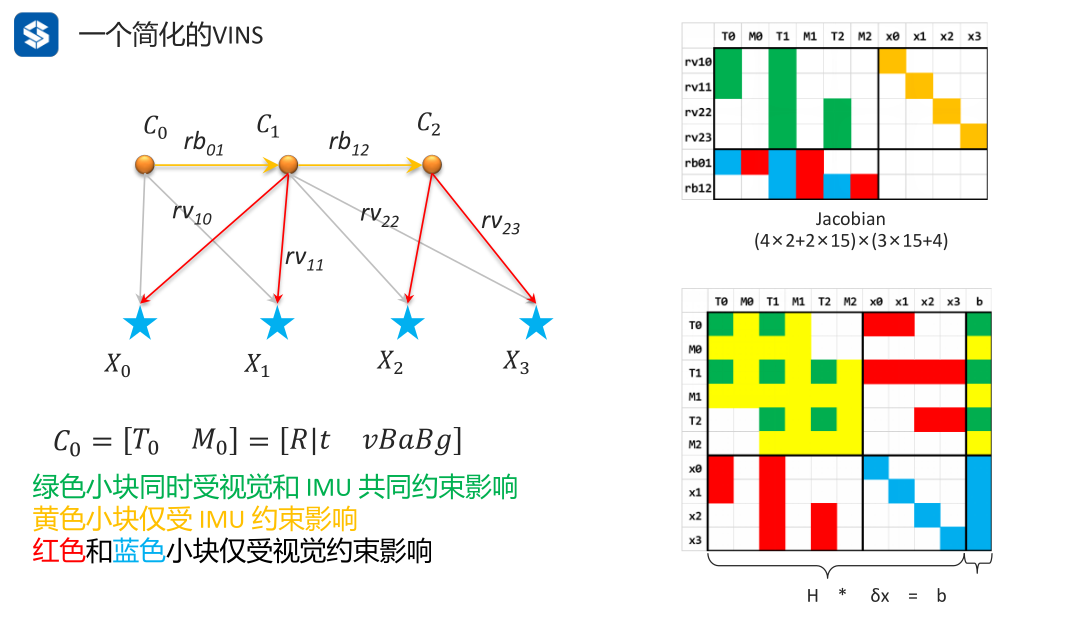
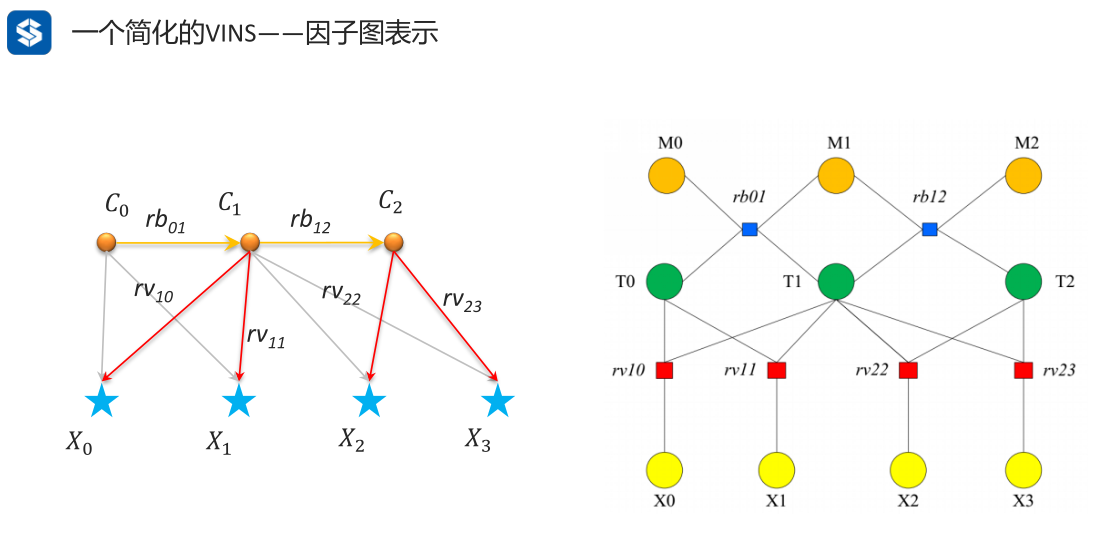
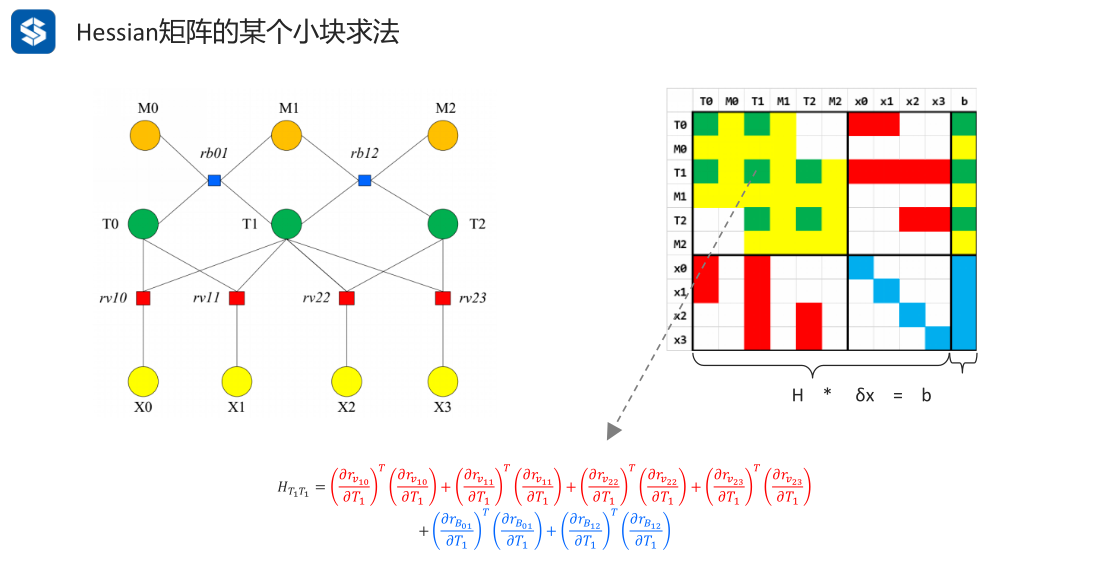
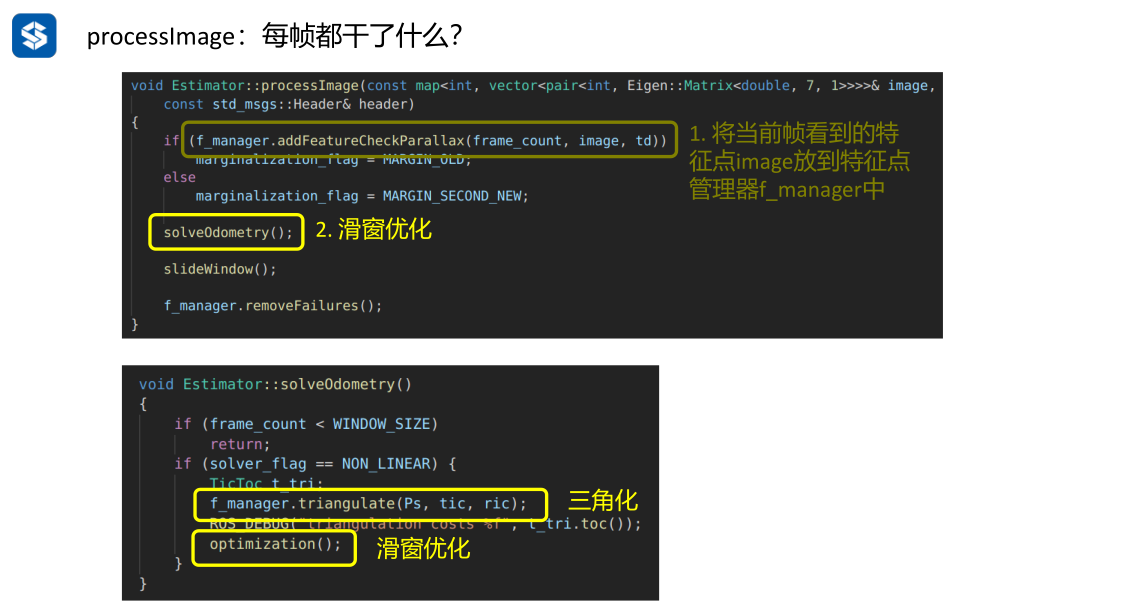
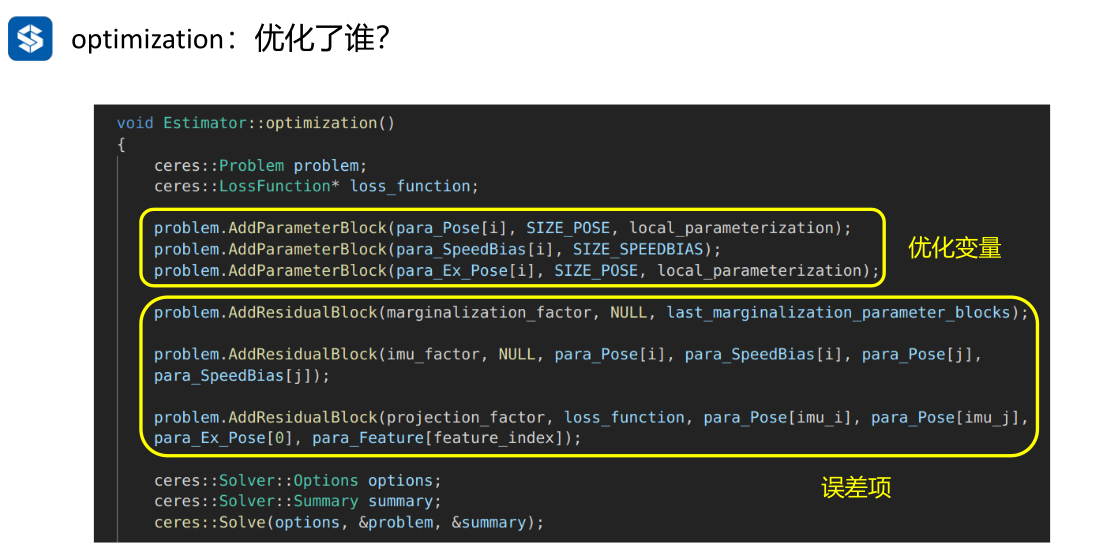
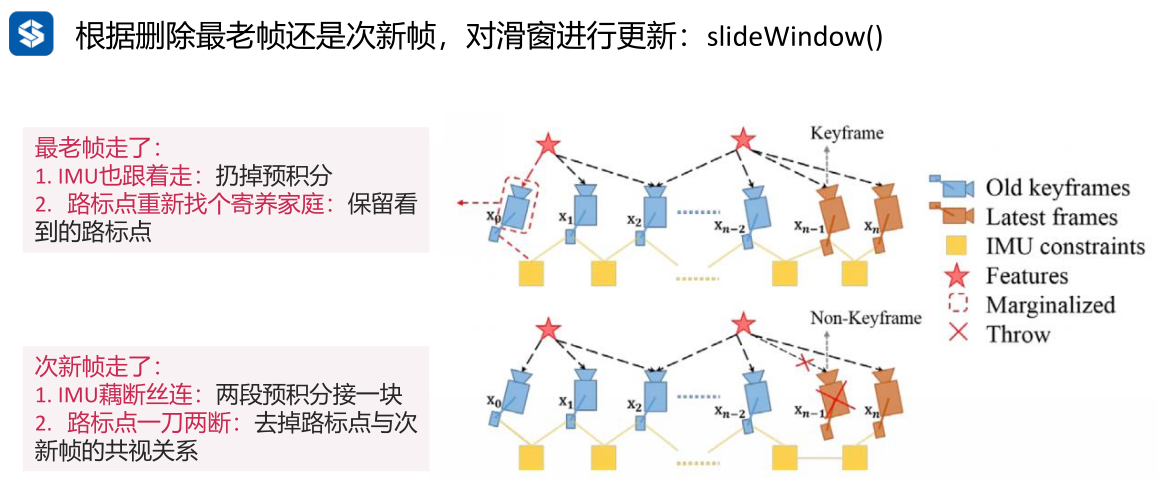
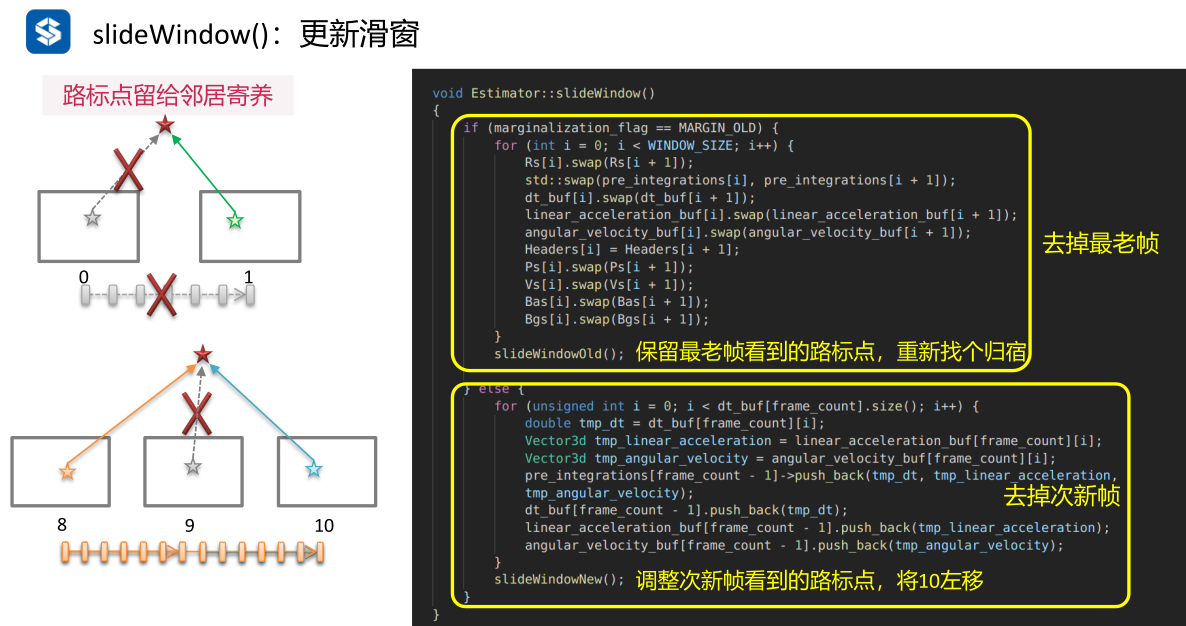
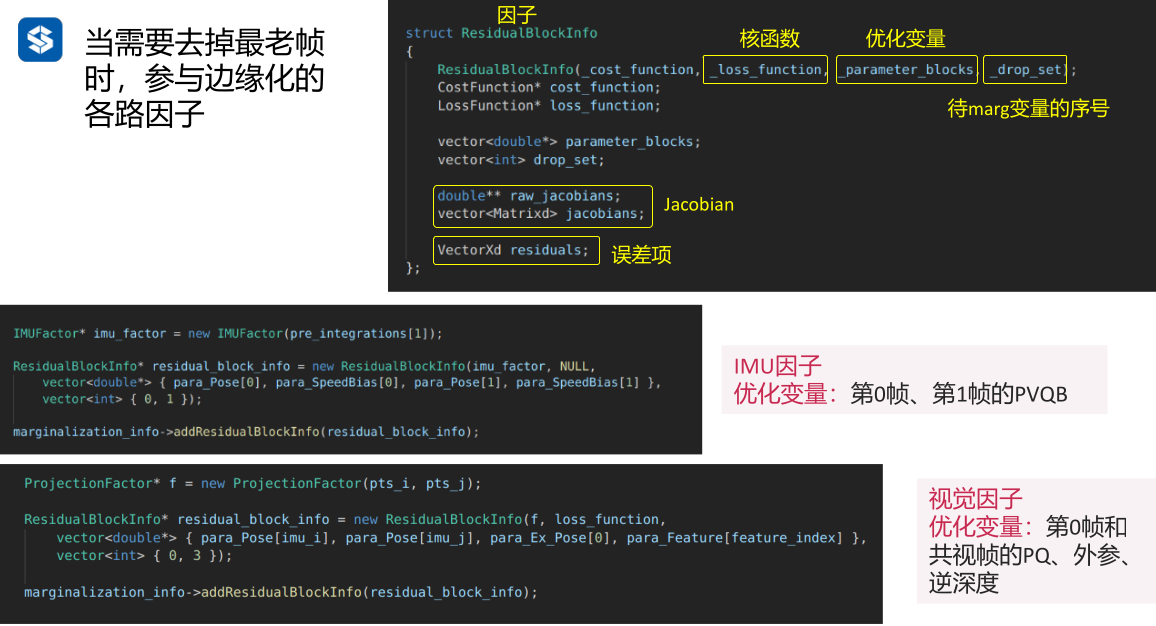
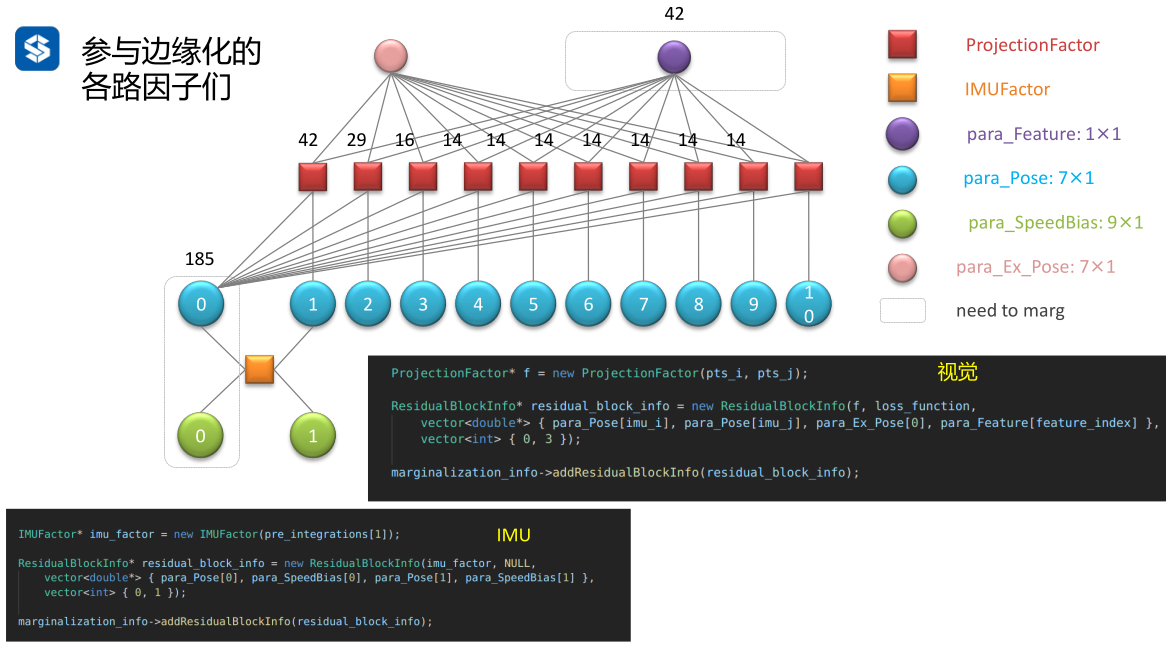
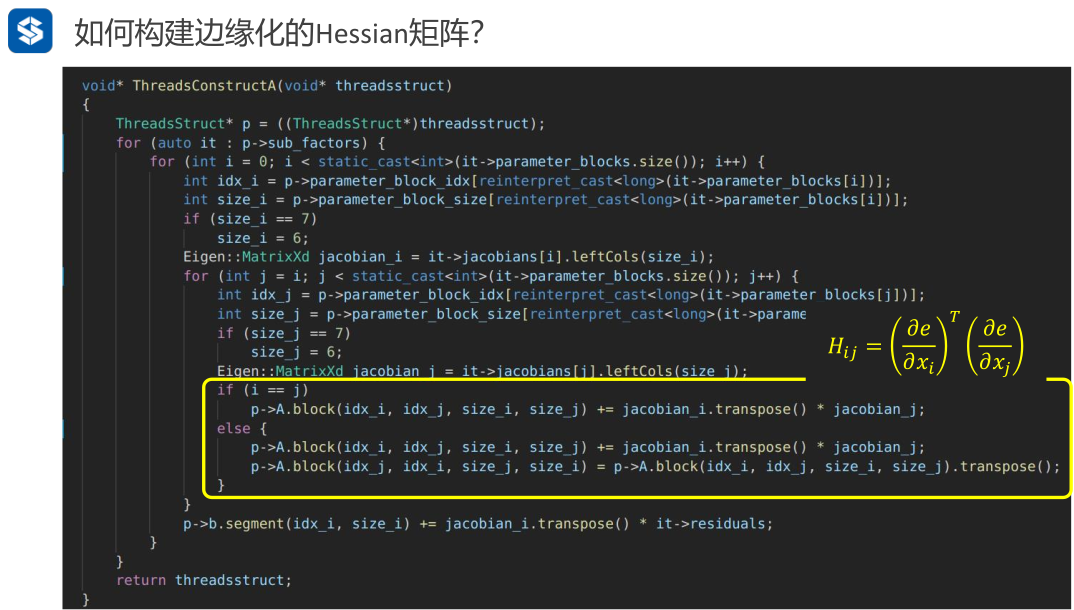
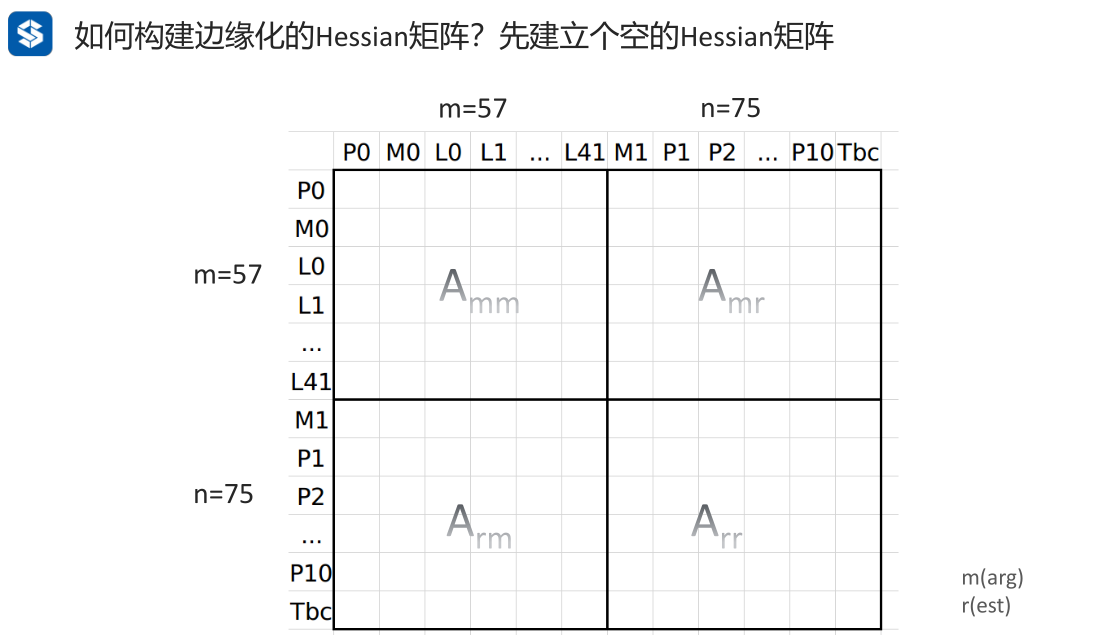
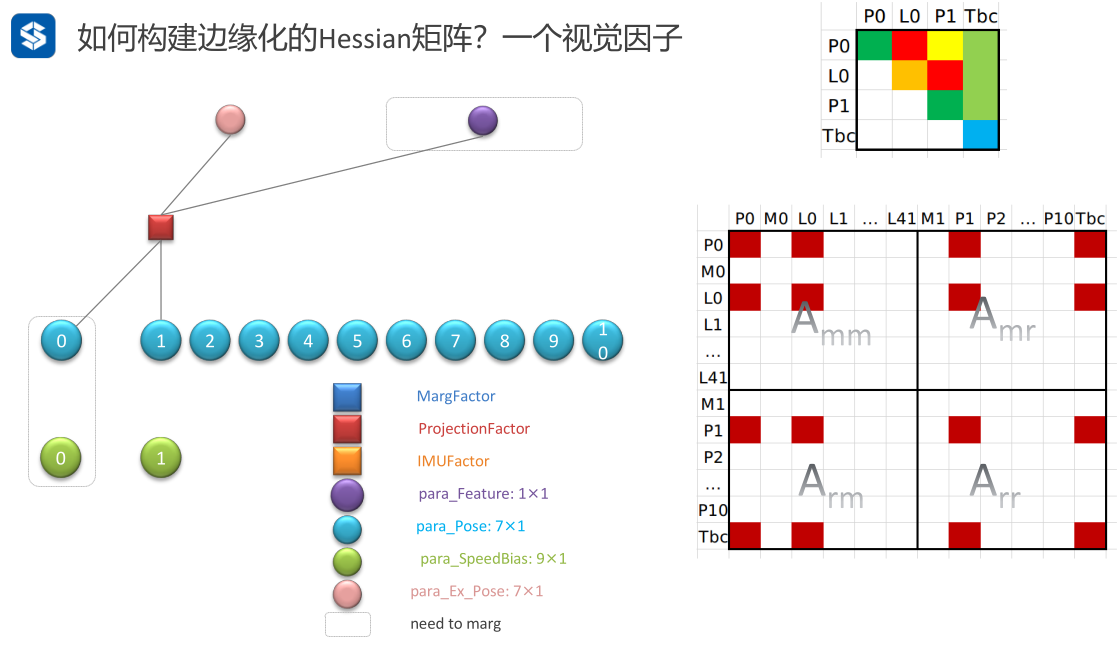
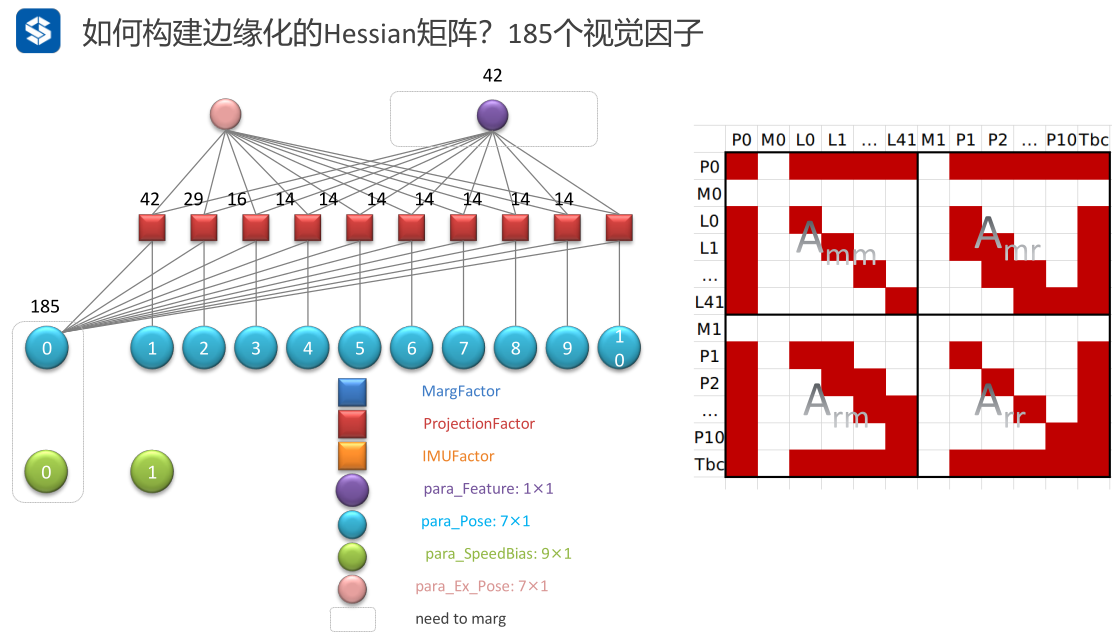
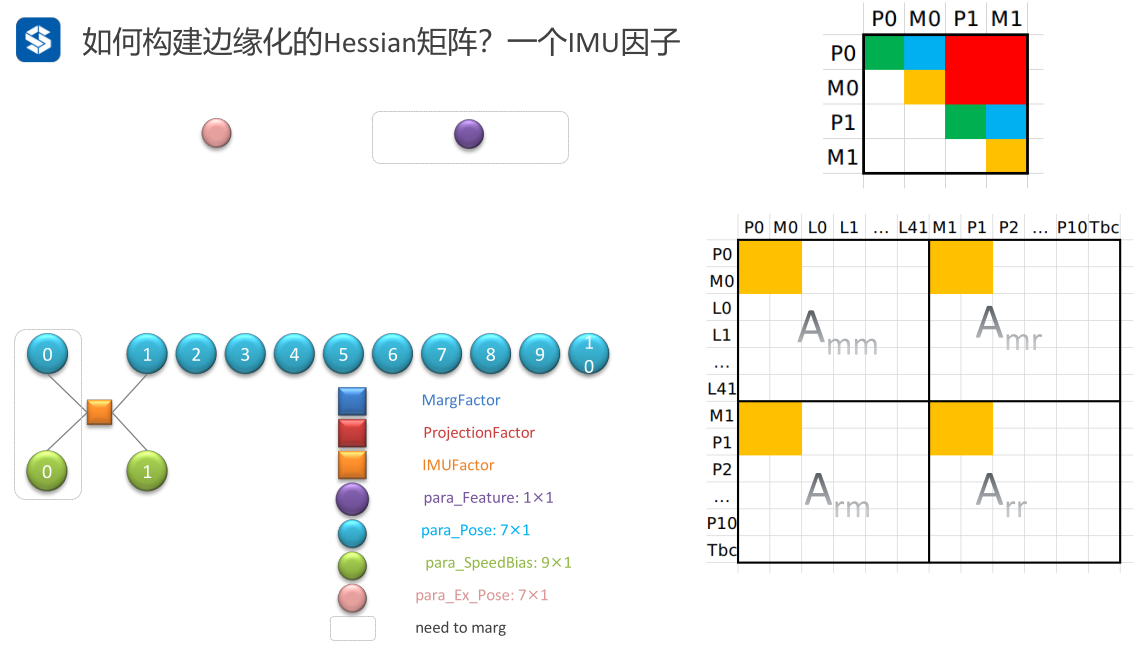
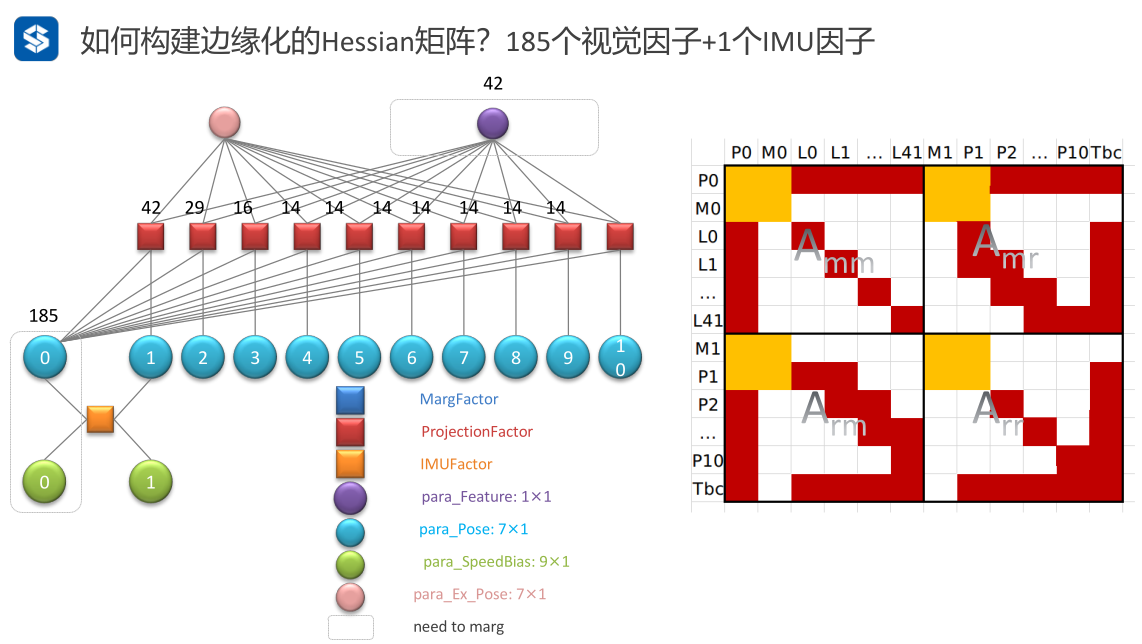
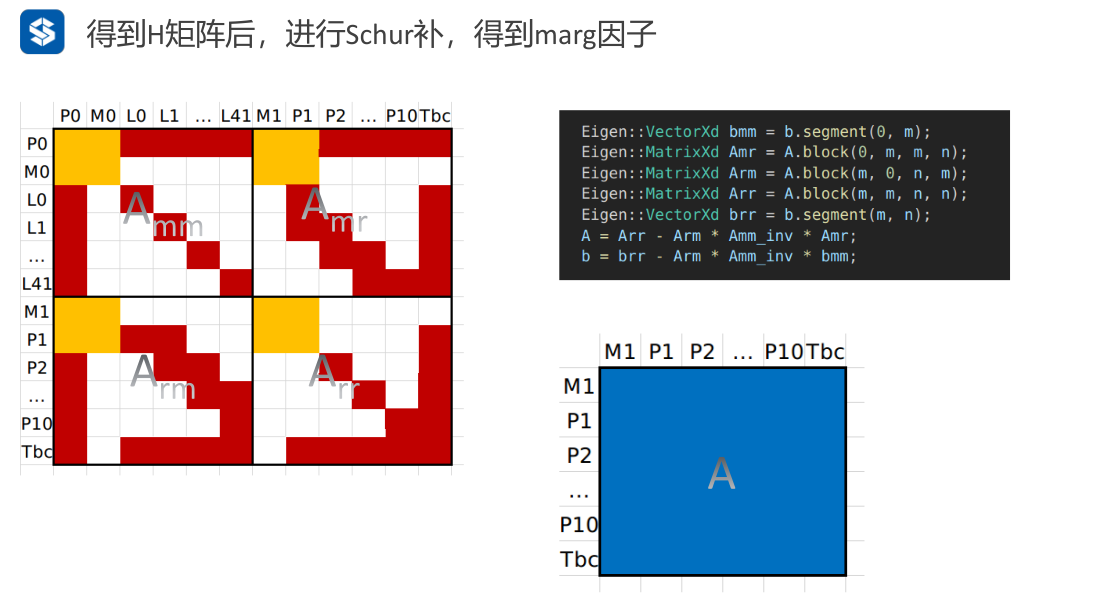
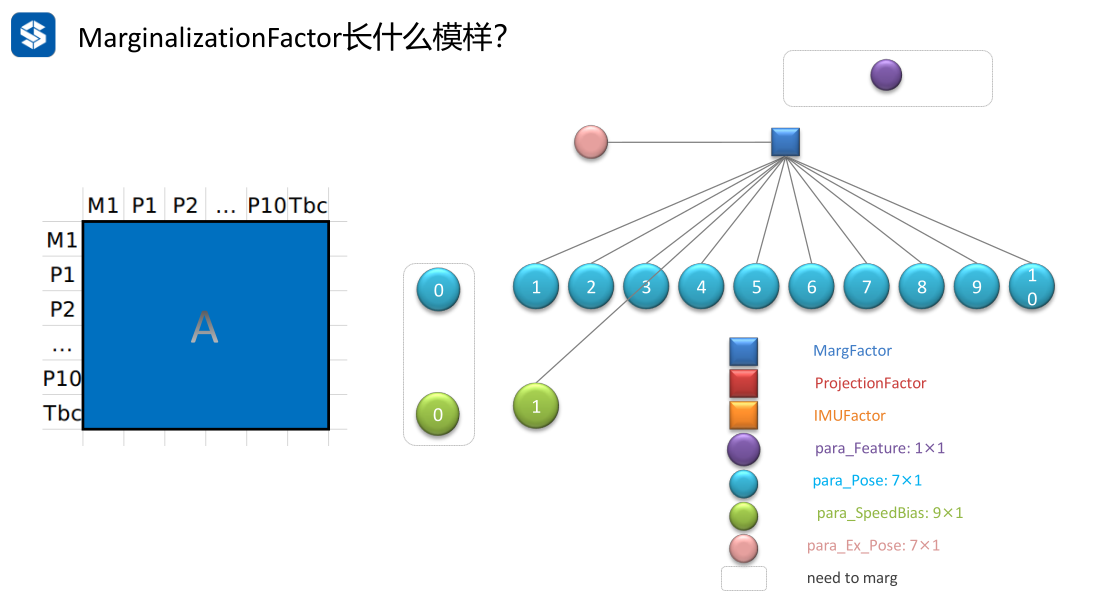
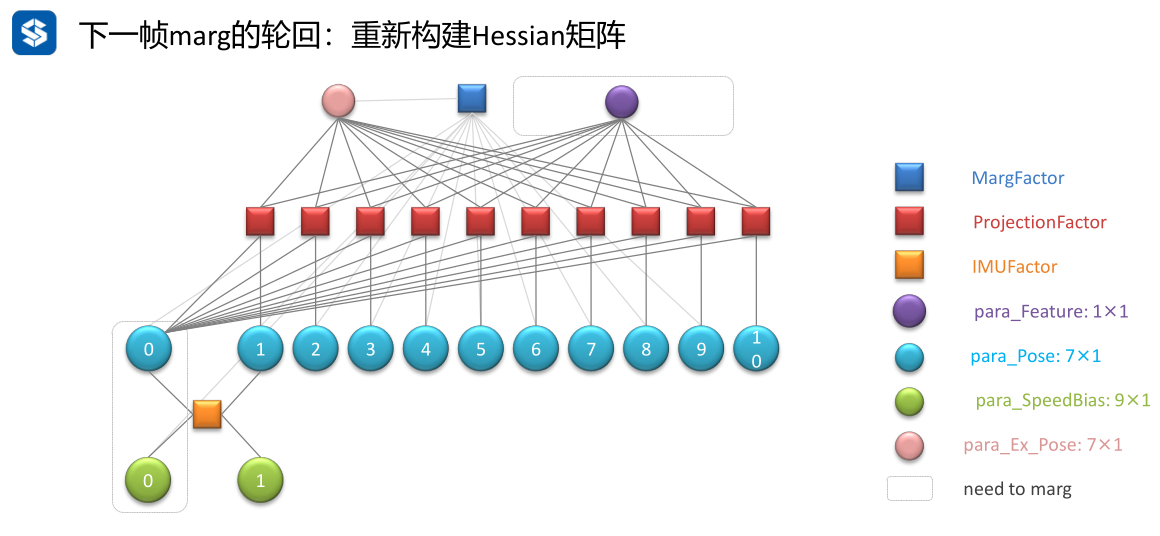
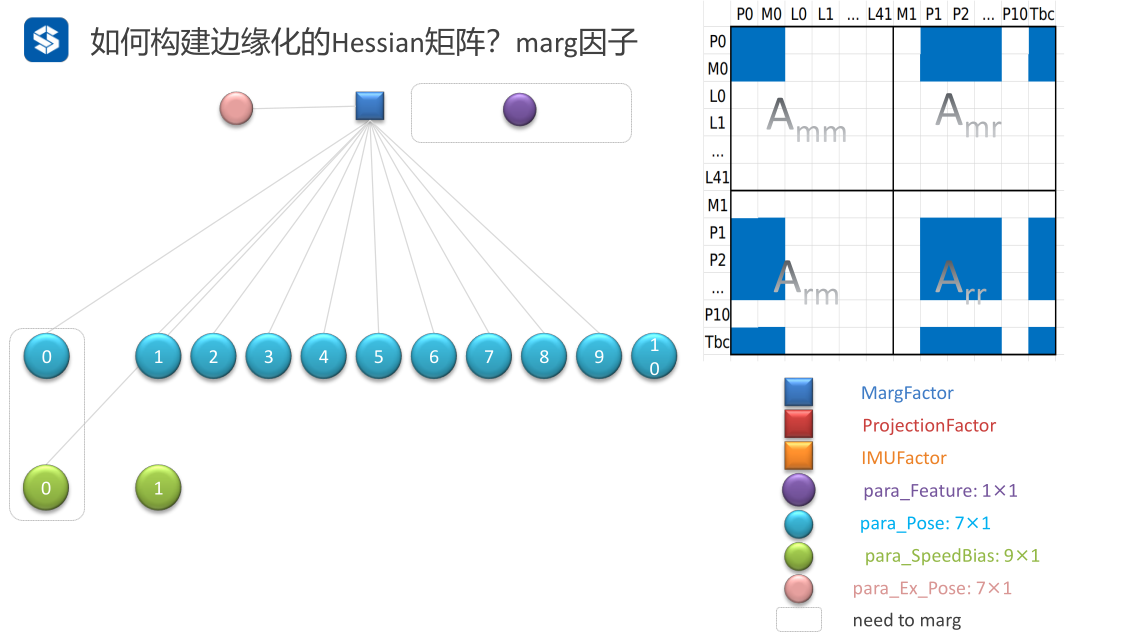
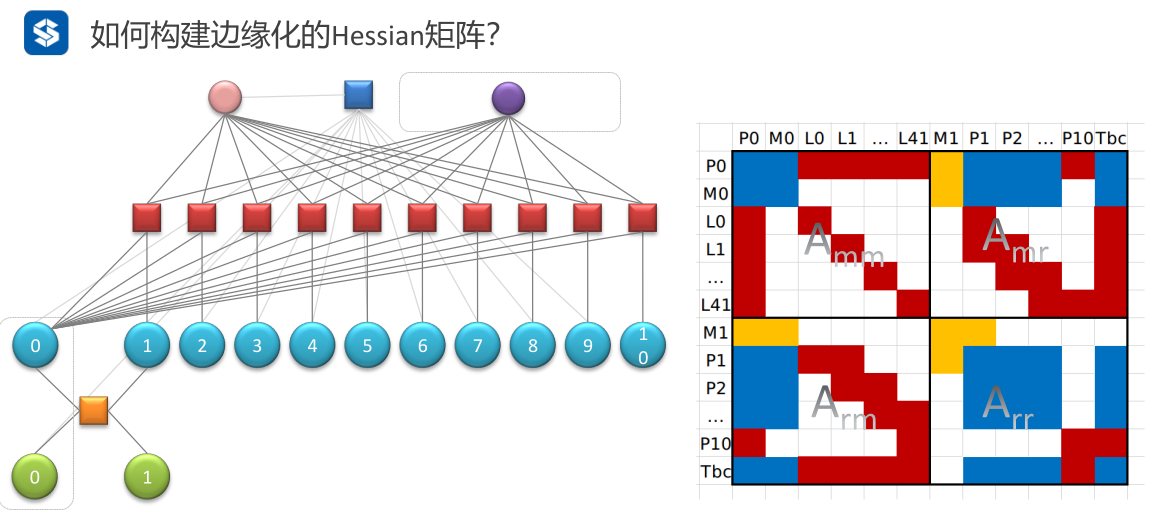
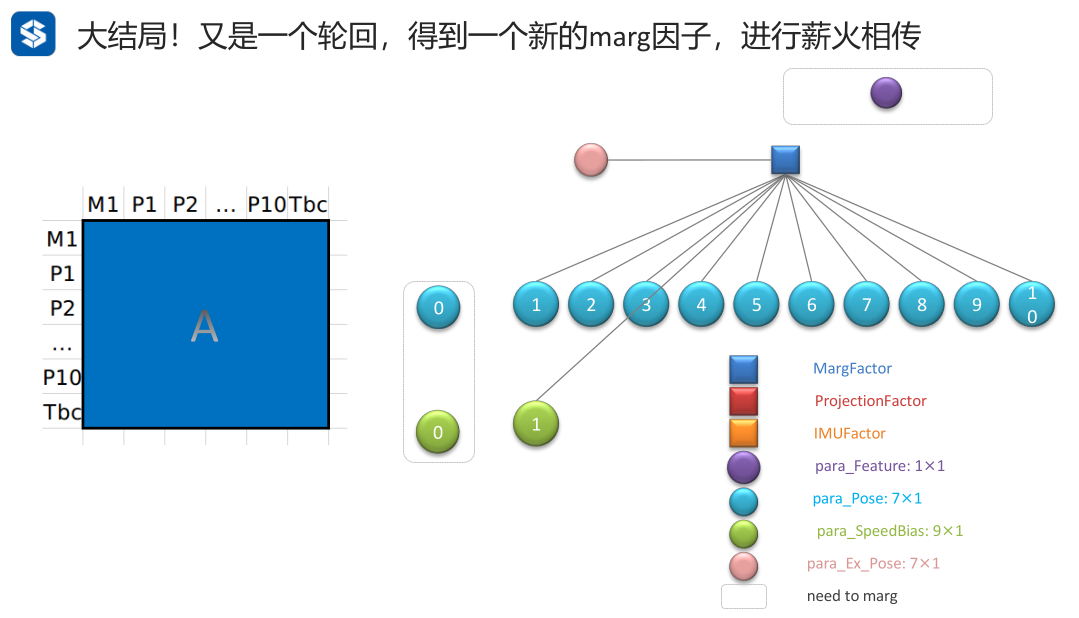
SLAM代码课程VINS-MONO 2020-04-20 Source Edit History VINS-Mono-2-后端 VINS-Mono-后端 class Estimator 对于单目来说,Camera Id始终为0 特征点管理器 因子图 视觉约束 因子图与Hessian矩阵的转换 IMU约束 一个简化的例子 滑窗优化 重投影误差约束 对应代码部分 IMU误差项约束 边缘化 VINS-Mono的边缘化策略 边缘化策略代码部分 边缘化的因子图表示 边缘化管理器 构建边缘化Hessian