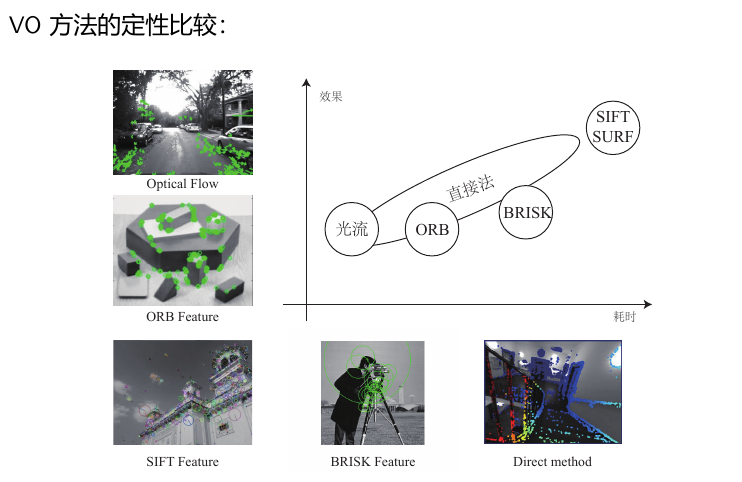
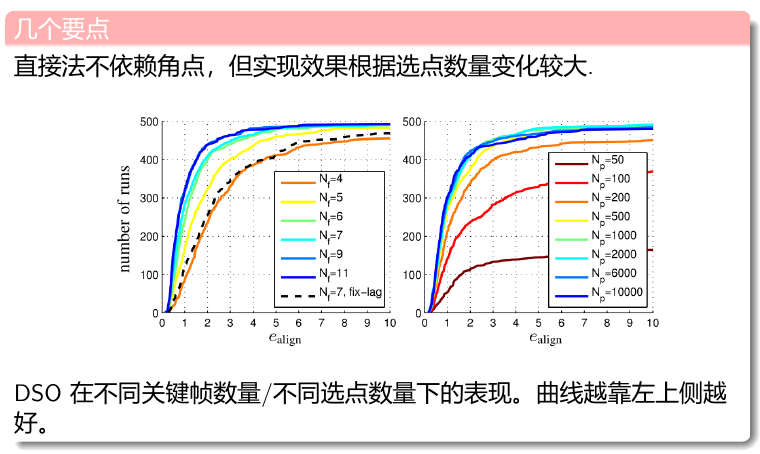
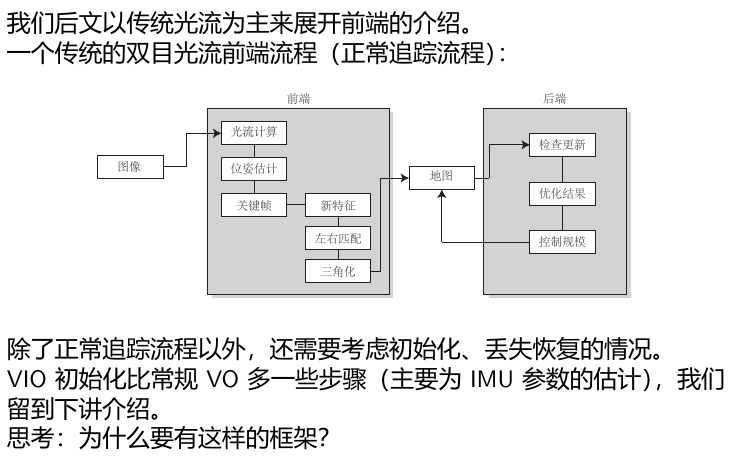
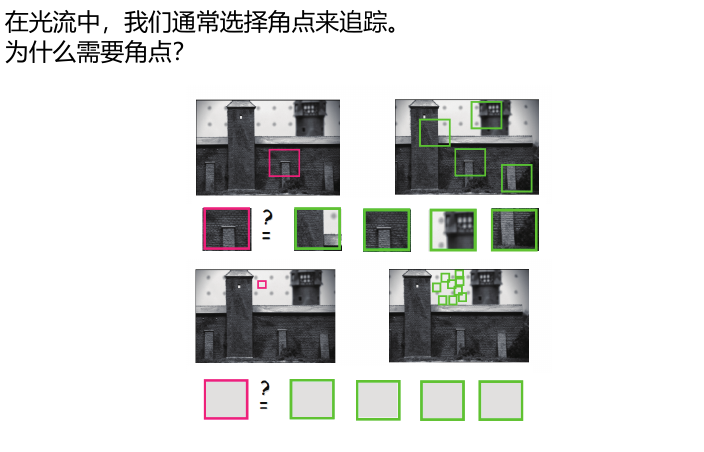
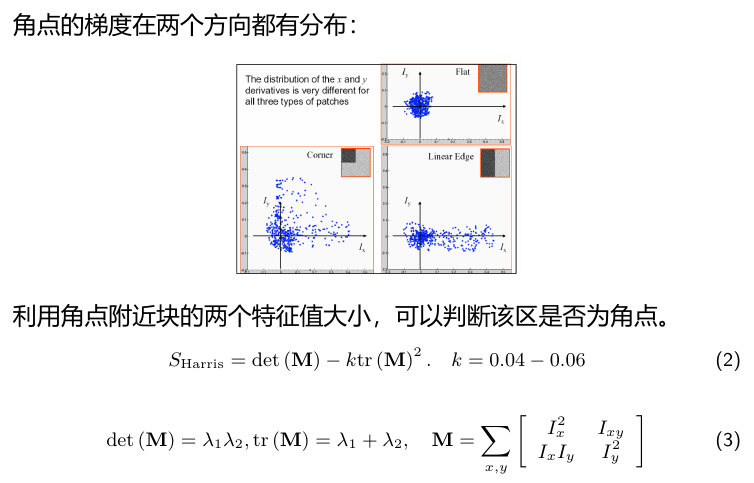
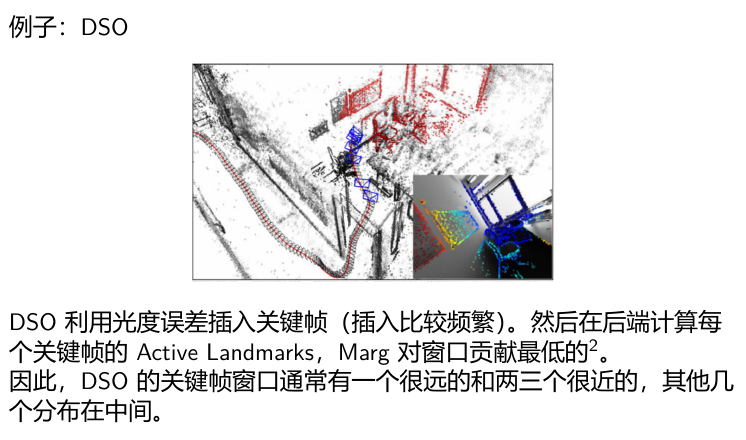
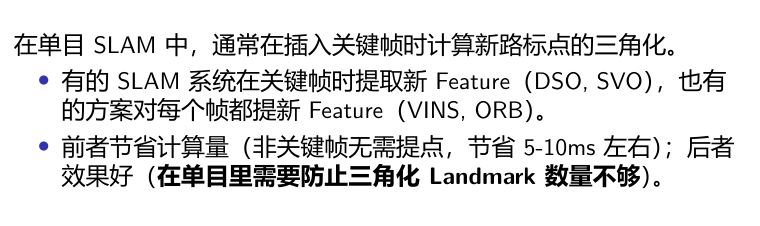
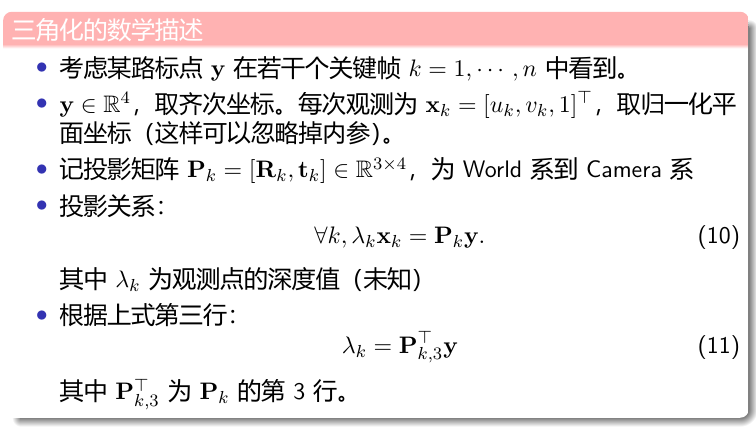
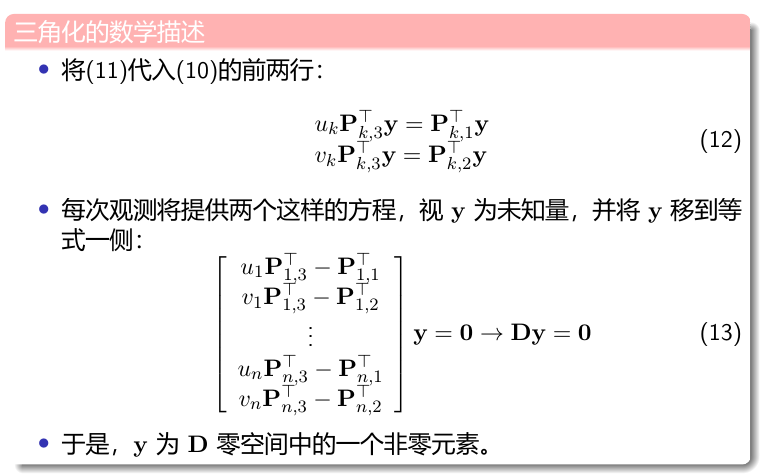
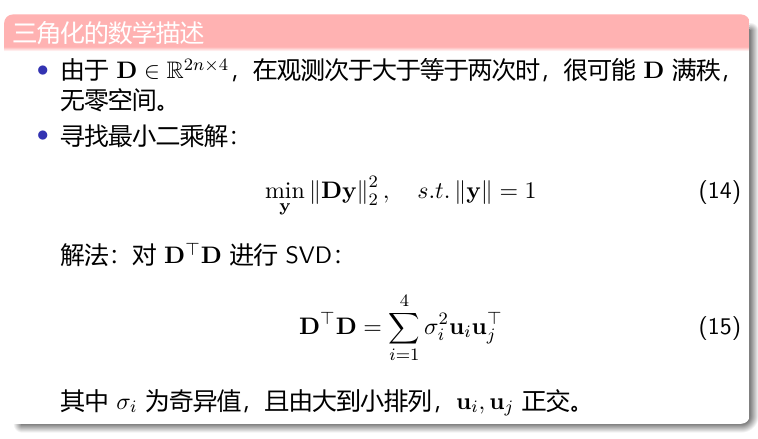
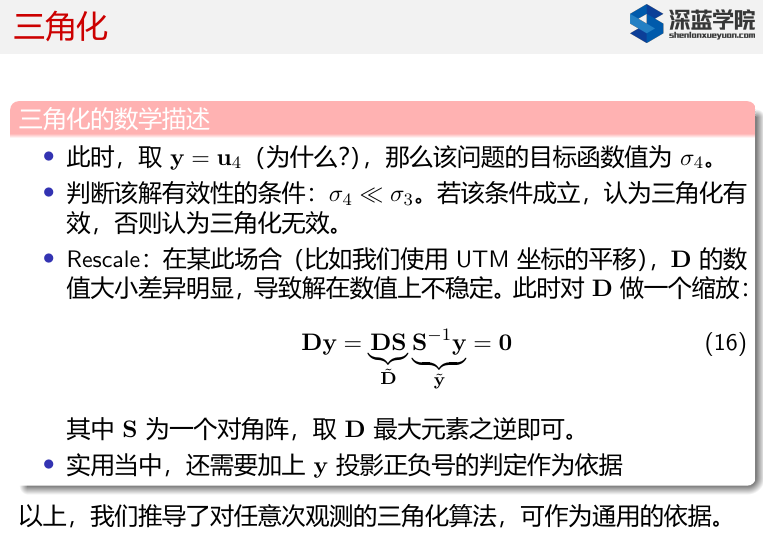
VIO第六讲 2020-02-14 Source Edit History 第六讲_视觉前端 Catalogue 1. 前端1.1. 特征点提取_匹配和光流法1.2. 关键帧与三角化1.2.1. 三角化1.3. 参考资料 前端 image-20200214094912305 image-20200214095748303 image-20200214095757400 image-20200214095803446 image-20200214100352560 image-20200214100606867 ORB: 10--15毫秒 SIFT: 200+毫秒 GFTT: 10毫秒左右 直接法可能在实际应用中要好一点 image-20200214101228491 image-20200214101933123 特征点提取_匹配和光流法 image-20200214102149991 image-20200214102825118 image-20200214103119404 image-20200214103420368 image-20200214103634407 image-20200214103650613 image-20200214104008183 image-20200214104111176 关键帧与三角化 image-20200214104754044 image-20200214105105811 image-20200214105450166 image-20200214105656337 image-20200214105839030 三角化 image-20200214110028435 image-20200214110458552 image-20200214110711783 当系数矩阵D满秩的时候, 齐次方程组有唯一解, 也就是 零解 image-20200214115407894 参考资料