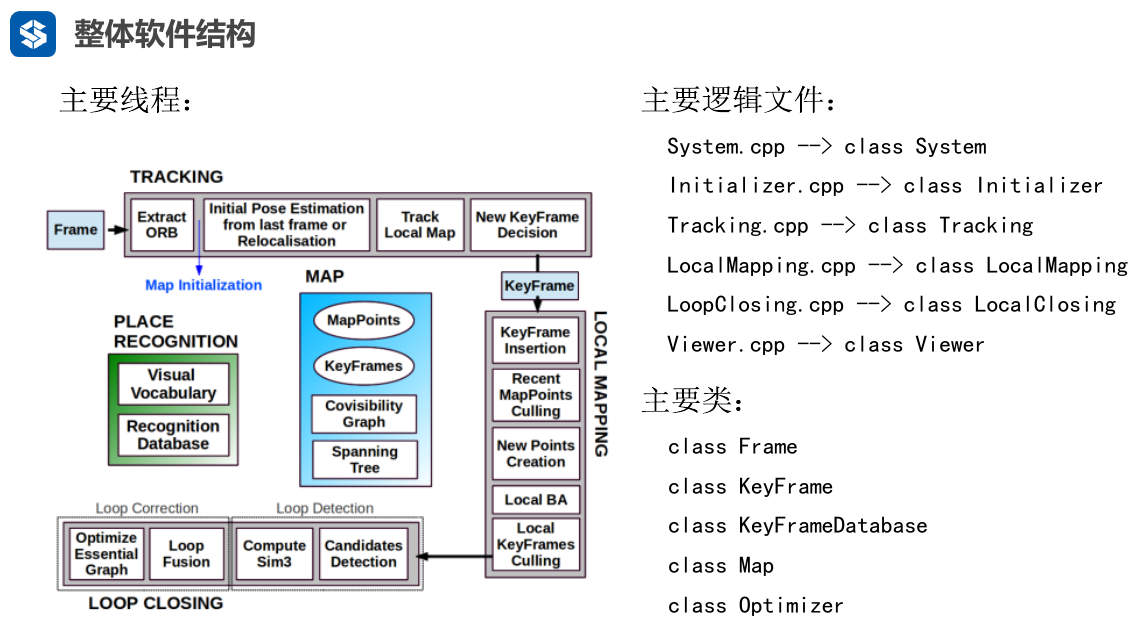
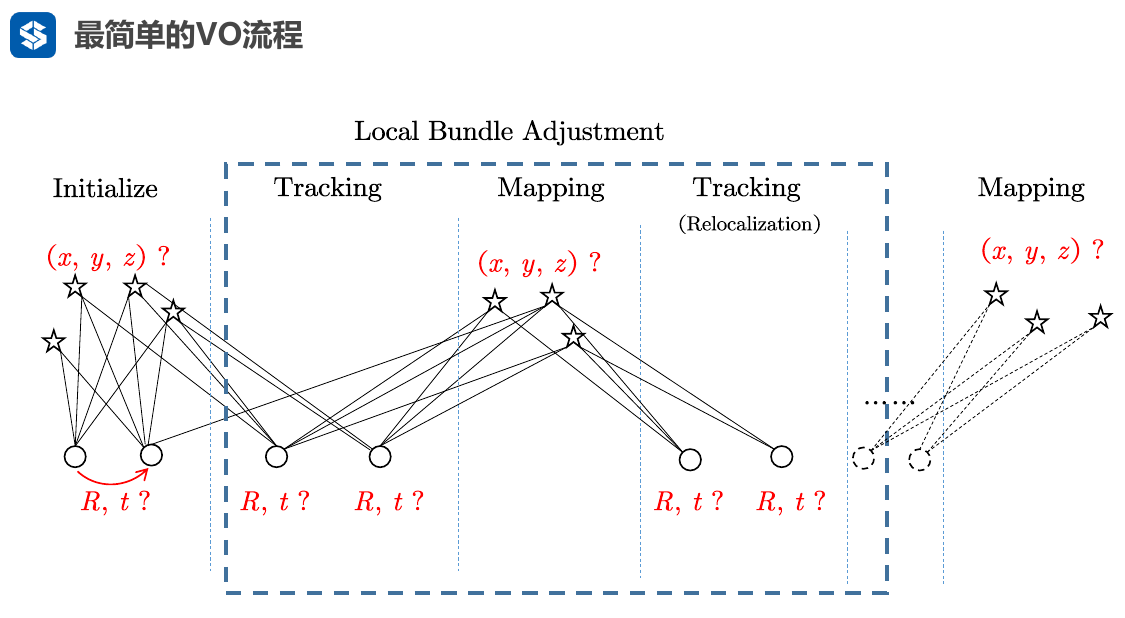
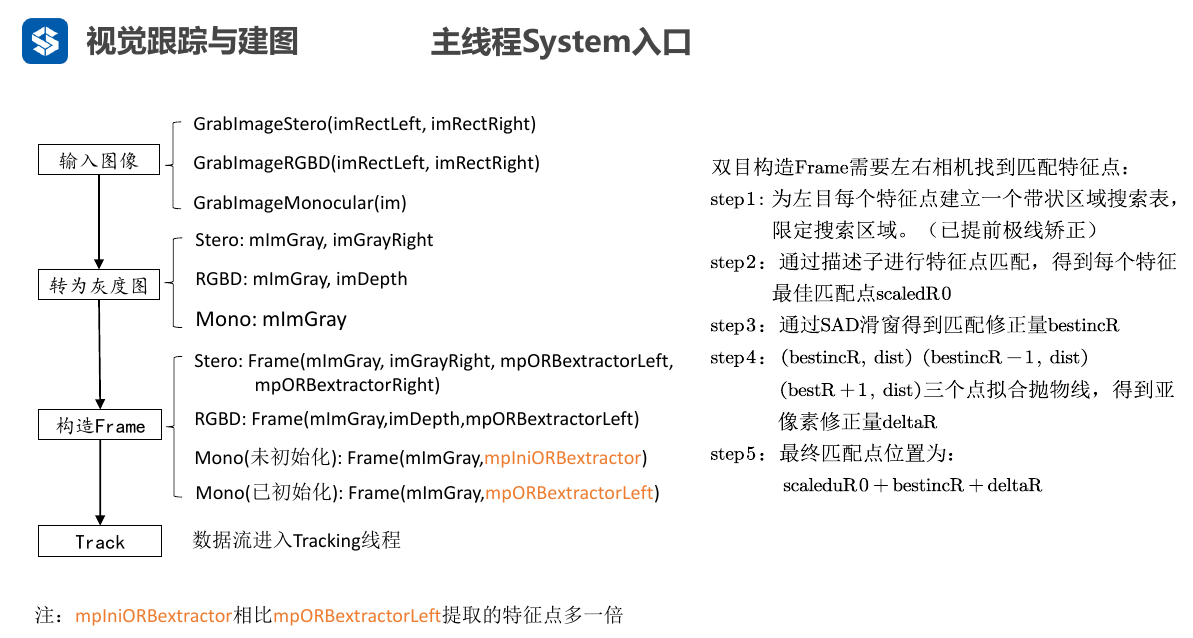
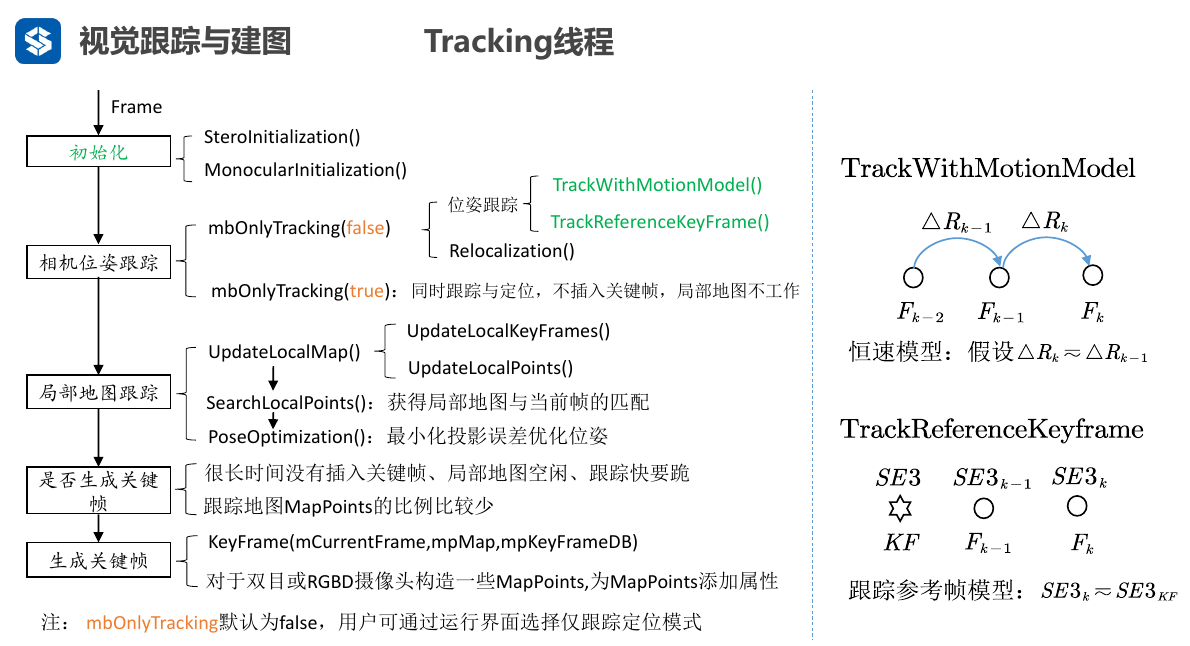
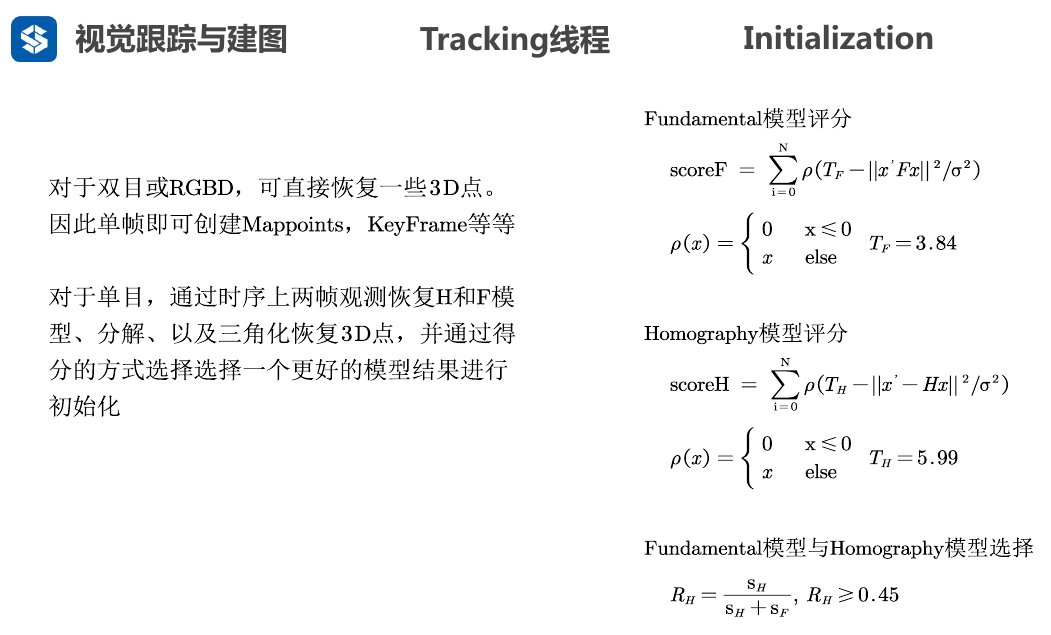
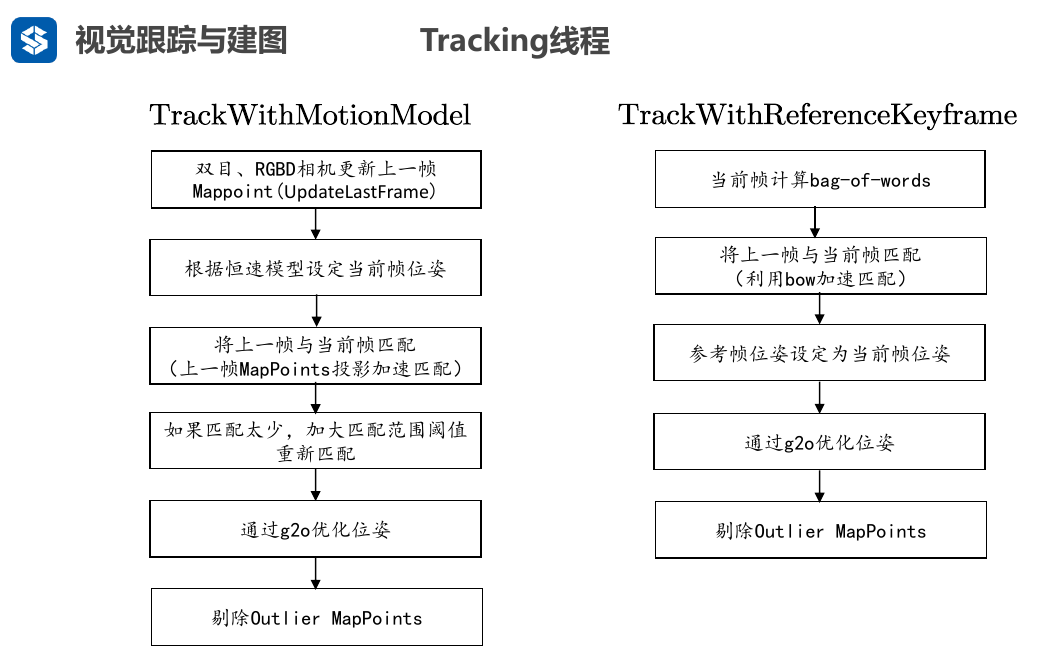
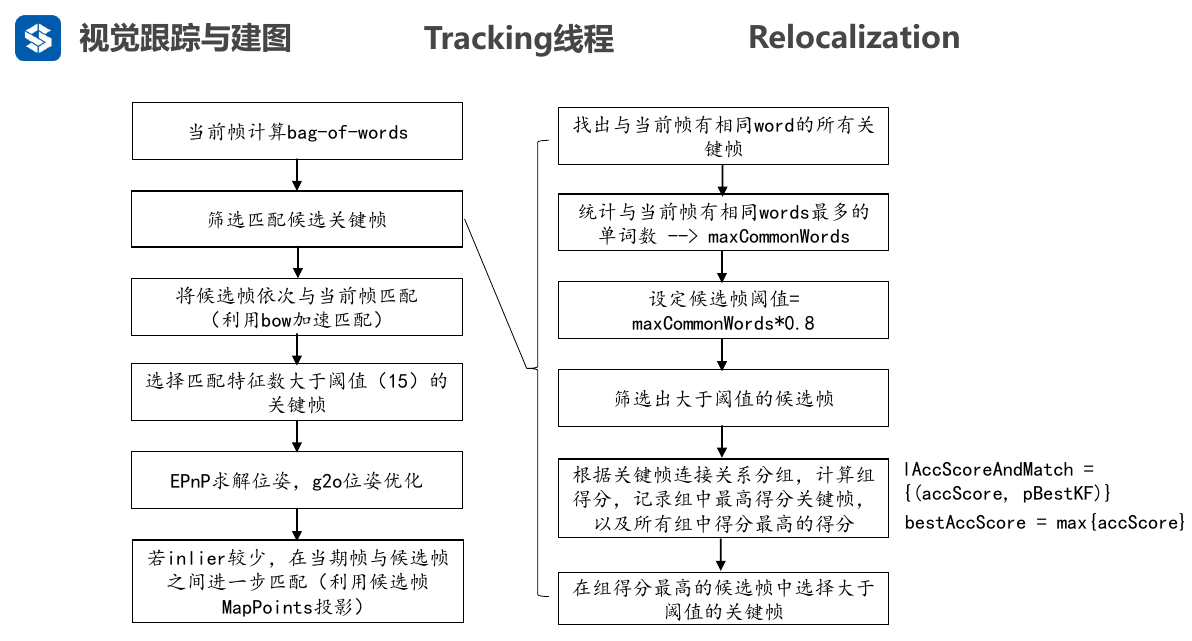
SLAM代码课程ORB_SLAM2 2020-02-25 Source Edit History 第二讲-ORB_SLAM2-视觉跟踪与重定位 Catalogue 1. 整体结构2. 视觉里程计基本原理3. ORB_SLAM2程序主入口4. 跟踪与建图5. 跟踪线程6. 重定位6.1. 参考资料 整体结构 视觉里程计基本原理 单目的初始化很复杂 工程上更加趋向于双目、RGB-D,可以直接初始化成功 初始化:得到第一、二帧的位姿,以及以第一帧相机坐标系的3D点 跟踪:定位->增加3D点->定位->... ORB_SLAM2程序主入口 跟踪与建图 由于相机在移动,所以在能看到初始化的时候生成的3D点会越来越少,因此会同时生成一些3D点(mappoint),为了后面的移动可以观测到足够的3D点。 跟踪线程 重定位 参考资料