- 1. 1. 控制系统的李雅普诺夫稳定性分析
- 2. 2. 李雅普诺夫(Lyapunov)稳定性分析方法
- 3. 3. 线性系统的李雅普诺夫稳定性分析
- 4. 4. 问答
- 5. 5. 参考
1. 控制系统的李雅普诺夫稳定性分析
1.1. 对自动控制系统的要求
- 稳定:系统工作的前提
- 准确:稳态误差最小或者无差调节
- 快速:快速、平稳响应
1.2. 两种经典稳定性判据
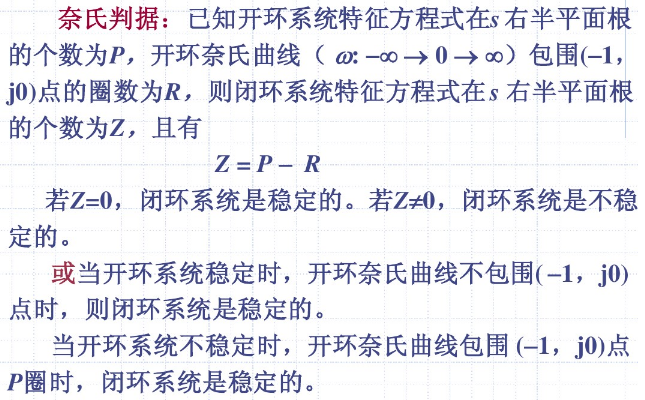
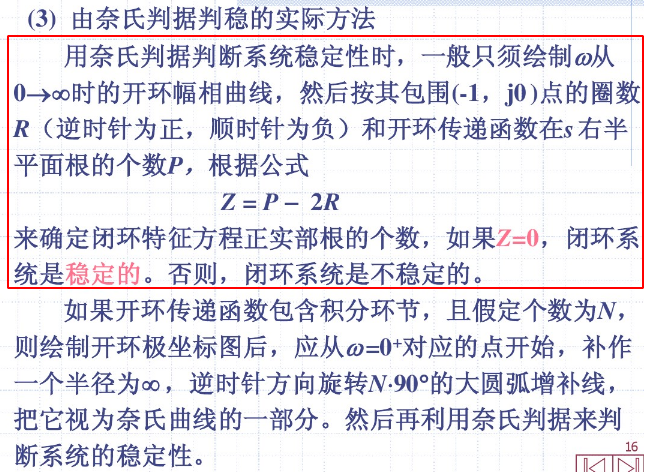
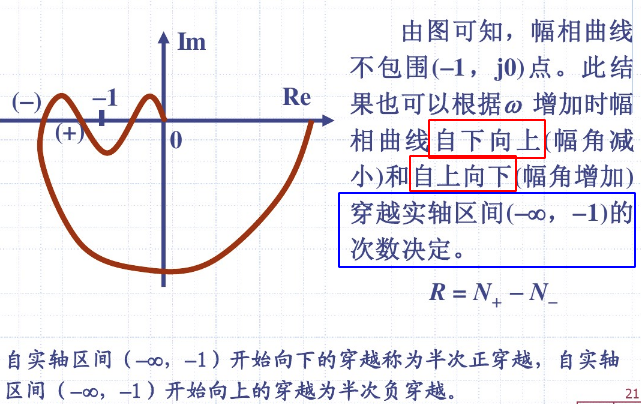
1.2.1. 奈奎斯特稳定判据
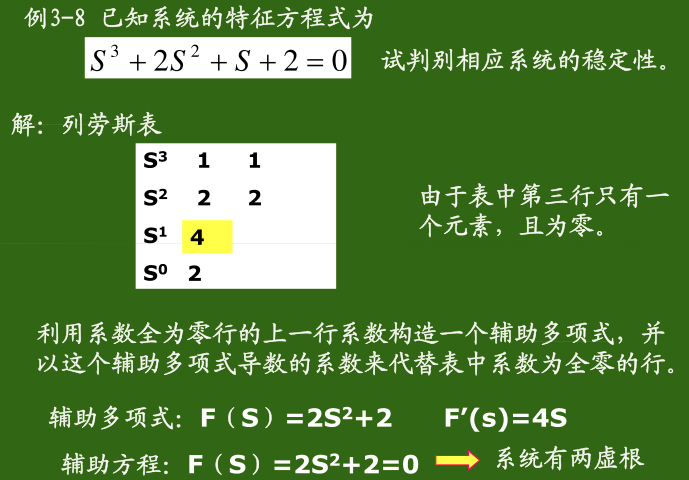
1.2.2. 劳斯判据
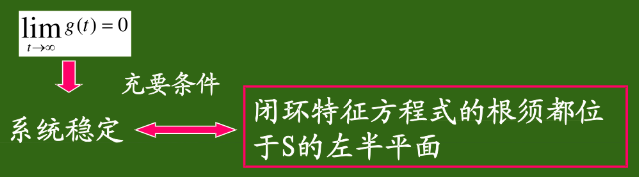
稳定的条件:系统传递函数的极点全部位于复平面左侧
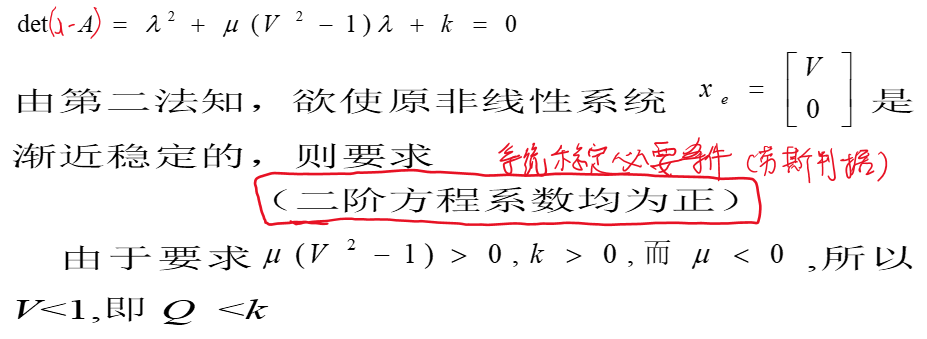
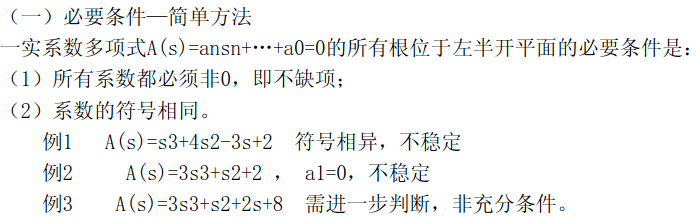
必要条件:闭环传递函数特征方程的所有系数全部为正(不允许为0或负数)
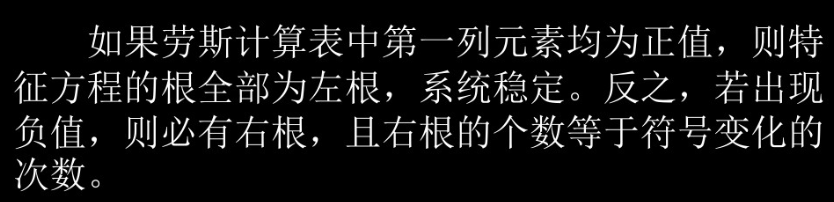
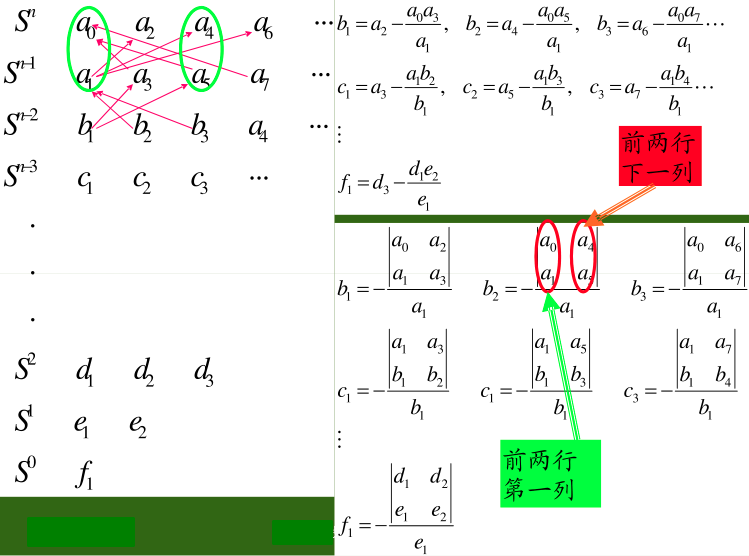
充要条件:劳斯表的第一列元素全部为正
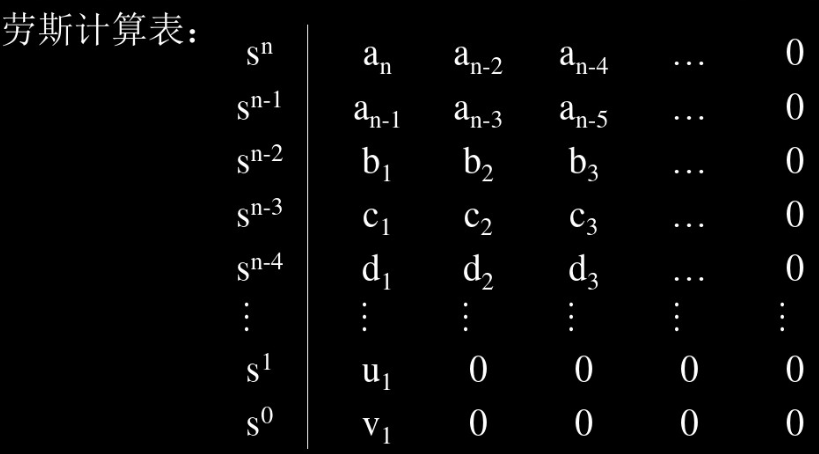
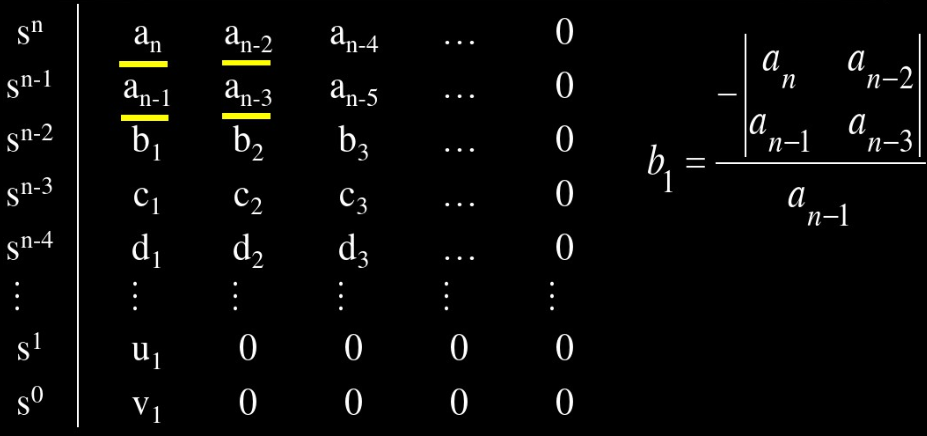
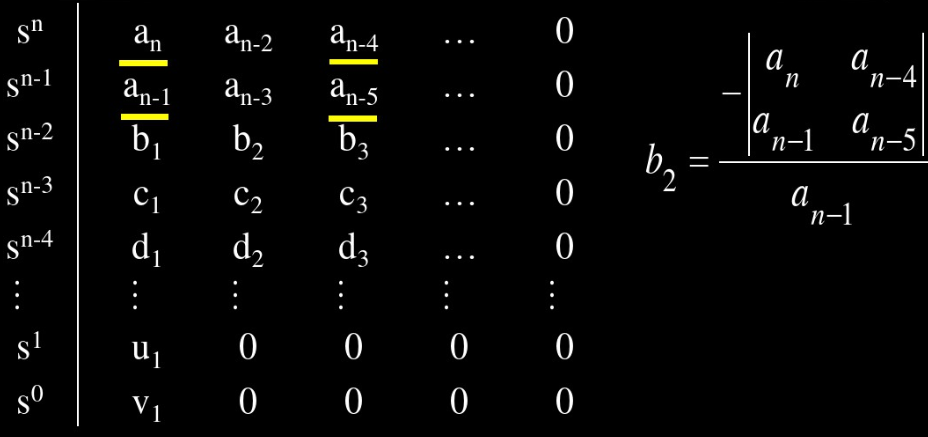
稳定判据:
2. 李雅普诺夫(Lyapunov)稳定性分析方法
2.1. 间接法——第一法
通过解系统微分方程,利用解的性质判断,特征根全是负实数根
基本处理思路:
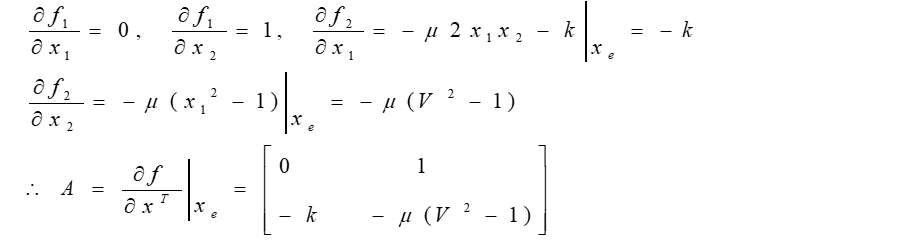
- 将非线性状态方程线性化
- 解线性化定长系统的特征值========>判定是否稳定
2.1.1. 推导
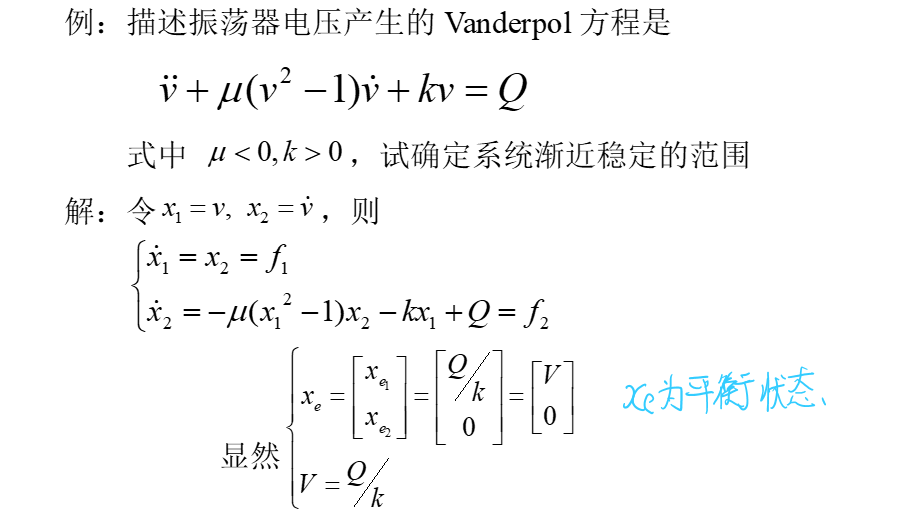
设有系统\(\dot{x}=f(x,t)\)
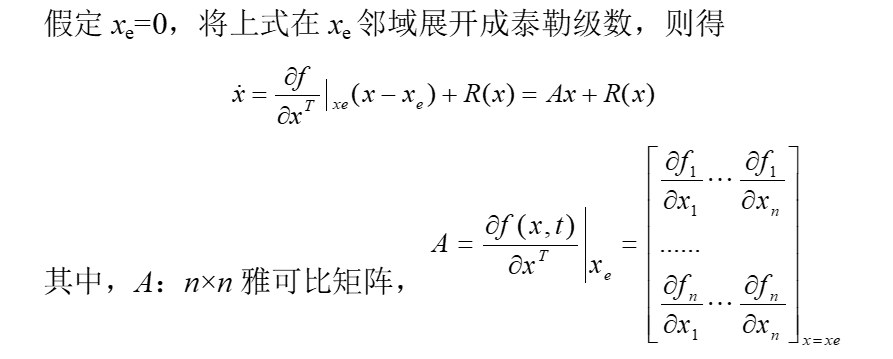
其中,
- R(x)是包含对x的二次以及二次以上的高阶导数项,Ax为线性化之后的一次近似
所以,有 \[ \dot{x}=Ax \] 关于稳定性的判断
- 如果矩阵A的所有特征值都具有负实部,则\(x_e\)总是渐近稳定的,而且系统的稳定性与高阶导数项R(x)无关
- 如果矩阵A的特征值中,至少有一个具有正的实部,则无论高阶项R(x)如何,\(x_e\)总是不稳定的
- 如果矩阵A的特征值中,至少有一个的实部为0,则\(x_e\)具有局部稳定特性,此时原方程不能使用其一次近似\(Ax\)来表征,此时属于临界状况,此时局部稳定性取决于高阶导数项R(x)
2.1.2. 例子
2.2. 直接法——第二法
2.2.1. 先导知识——二次型及其定号性
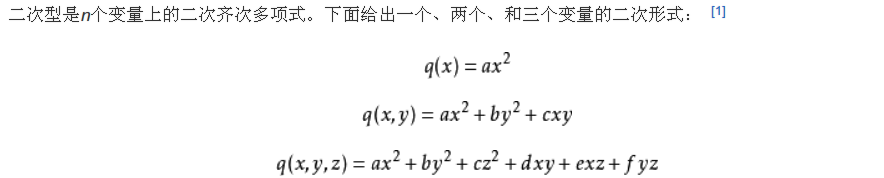
2.2.1.1. 二次型
2.2.1.2. 正定二次型
设有如下二次型:
\[ f(x_1,x_2,\cdots,x_n)=X^T A X \]
其中,矩阵A是对称矩阵(\(A=A^T,X=(x_1,x_2,\cdots,x_n)\))
如果
\[ \begin{aligned} \forall x \in R^n, X \neq 0 \end{aligned} \]
都有:
\[ f(x_1,x_2,\cdots,x_n)>0 \]
则称\(f(x_1,x_2,\cdots,x_n)\)是正定二次型,并且矩阵A正定
2.2.1.3. 二次型标量函数
二次型标量函数具有如下形式:
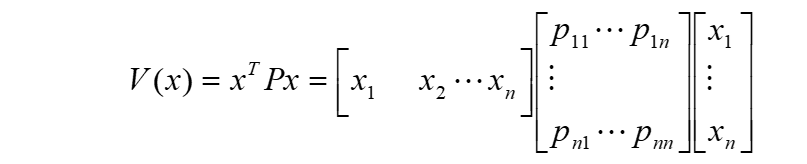
其中,矩阵P为实对称矩阵,即\(p_{ij}=p_{ji}\)
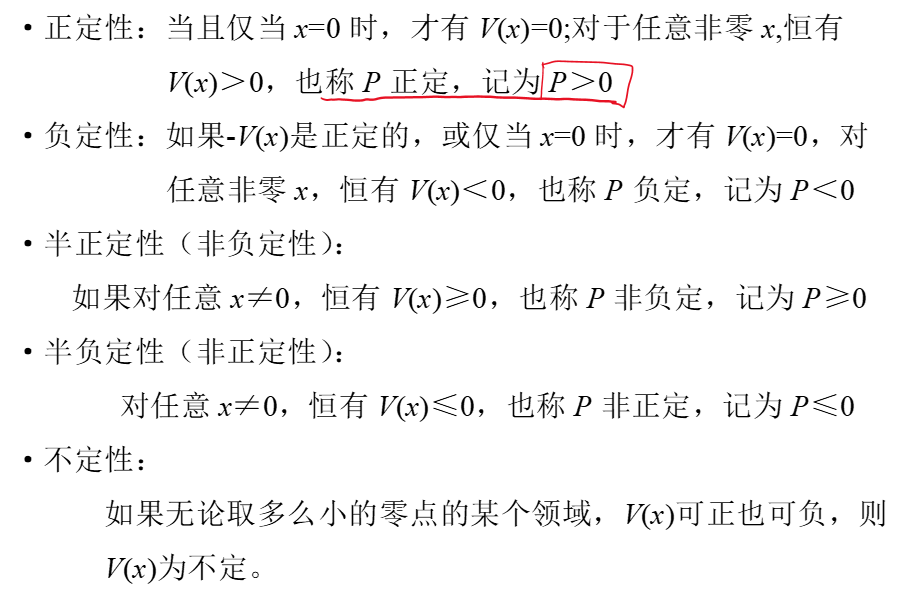
2.2.1.4. 定号性
二次型最基本的特性就是其定号性,即\(V(x)\)在坐标原点附近的特性。
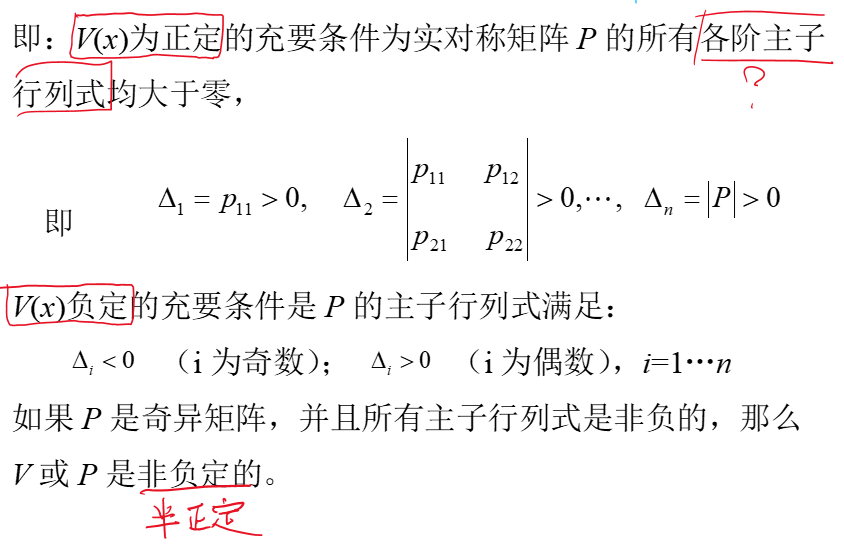
2.2.1.5. Sylvester(塞尔维斯特)准则
二次型函数的正定性可以由S准则来判定,即
2.2.1.6. 矩阵A正定
充要条件
- 正惯性指数(即正值的特征值个数)等于n
- 矩阵A与单位矩阵合同
- 矩阵A的顺序主子式大于0 (见后面补充)
- 矩阵A的特征值大于0
必要条件
- 矩阵A的行列式大于0 (但是行列式大于0的矩阵不一定正定)
补充
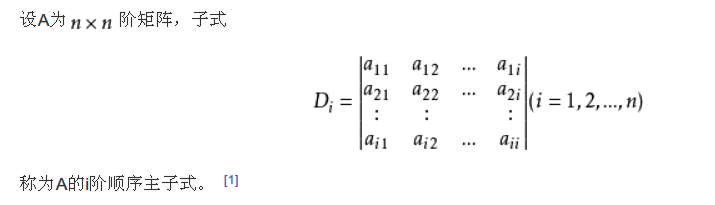
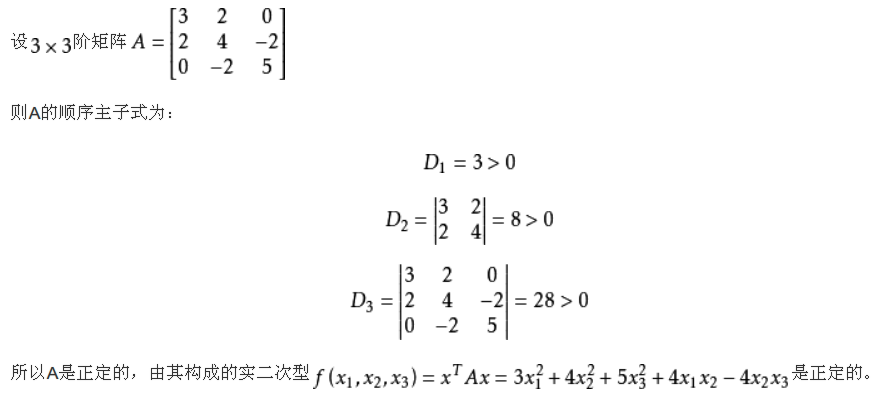
(1)顺序主子式
取n阶方阵的部分元素化为行列式形式。方阵的第k阶行列式是由该方阵的前k行和k列元素组成
例子:
2.2.2. 一致渐近稳定判定
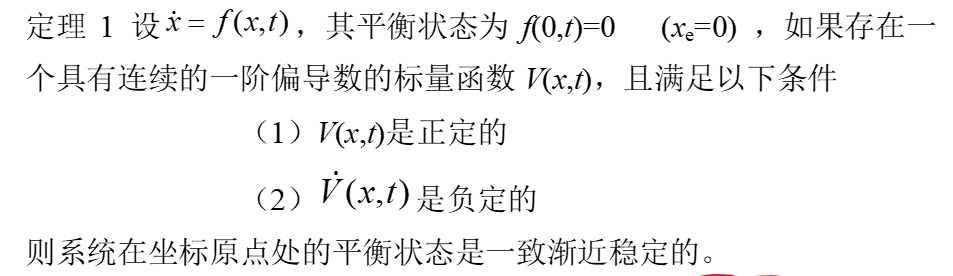
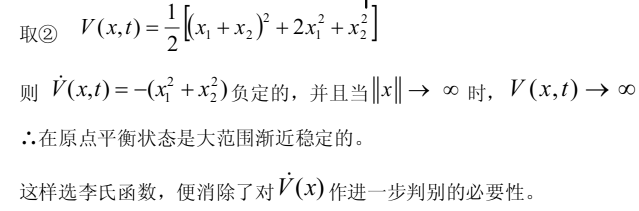
2.2.2.1. 大范围内渐近稳定
如果当\(||x|| \rightarrow \infin\) 时,有\(V(x,t) \rightarrow \infin\),则系统在坐标原点的平衡状态是大范围内渐近稳定的。
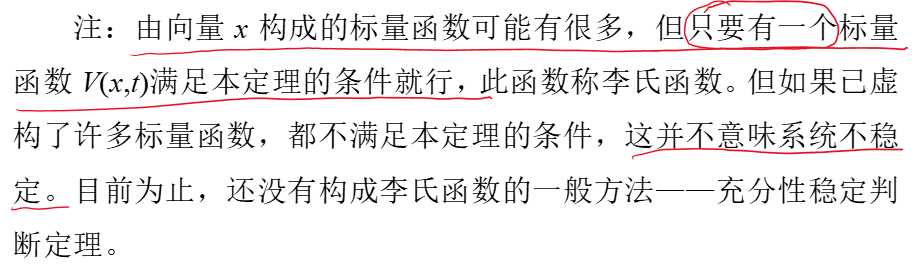
2.2.2.2. 李氏函数V(x,t)
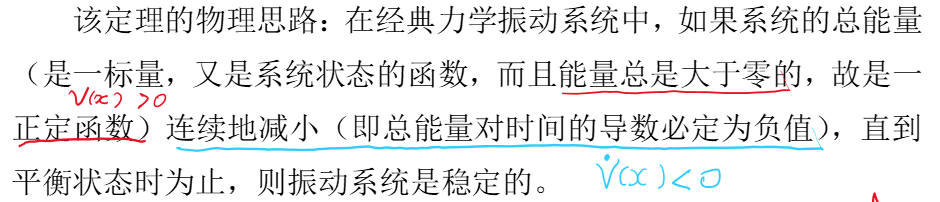
2.2.2.3. 形象描述
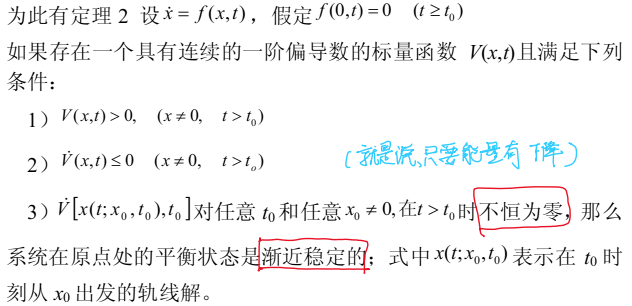
2.2.3. 渐进稳定判定
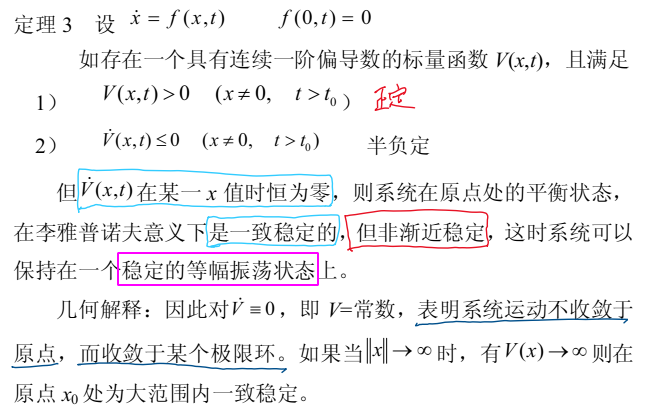
2.2.4. 一致稳定(等幅震荡)(非渐近稳定)
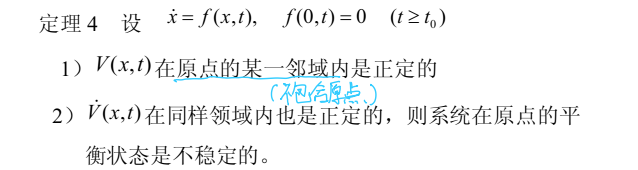
2.2.5. 不稳定
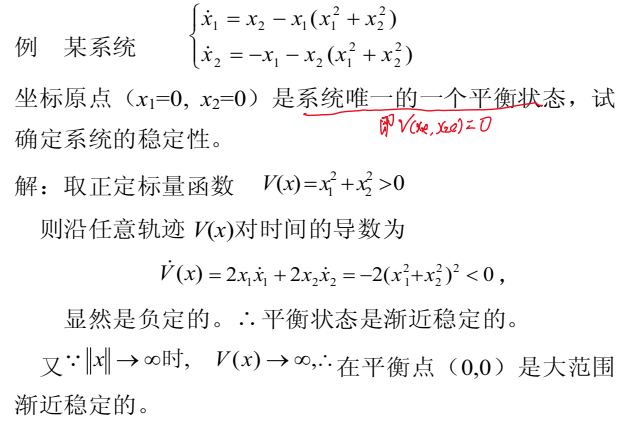
2.2.6. 例子1(大范围渐近稳定)
2.2.7. 例子2


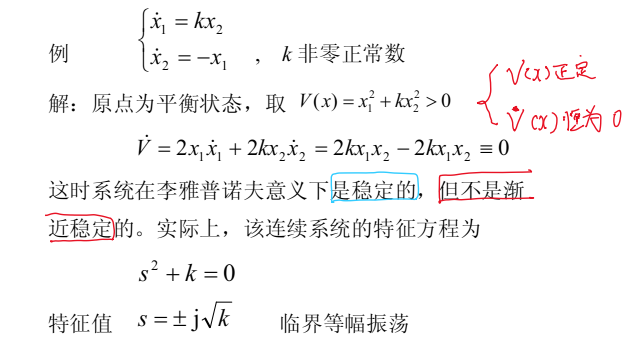
2.2.8. 例子3(一致稳定)(等幅震荡)
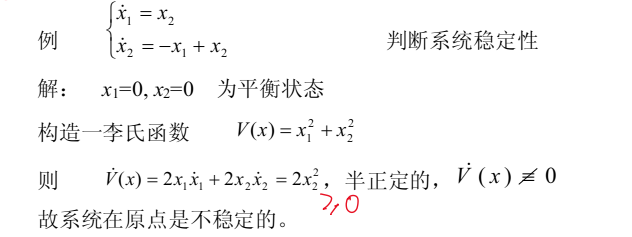
2.2.9. 例子4(不稳定)
3. 线性系统的李雅普诺夫稳定性分析
3.1. 线性定常系统(连续)
设有线性定常系统\(\dot{x}=Ax\)
则有:
- 假设矩阵A为非奇异矩阵,则系统唯一平衡状态在原点\(x_e=0\)处
- 如果它在状态空间中的某域内(包括\(x_e=0\))是渐近稳定的,则它一定是大范围渐近稳定的。
- 对线性系统\(\dot{x}=Ax\),其李氏函数\(V(x)\)一定可以取为二次型\(x^TPx\)的形式。
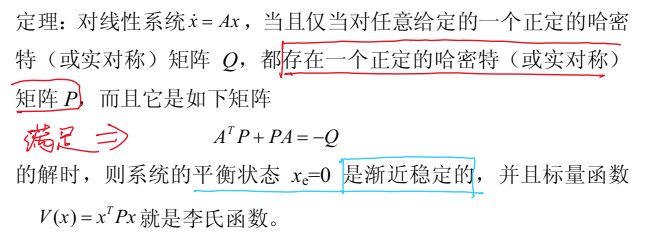
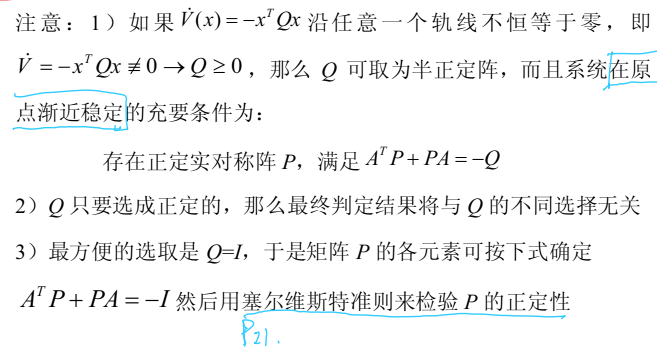
3.1.1. 线性定常系统李氏函数的求法
3.1.2. 根据求法得到的推论
推论:如果系统在\(x_e=0\)处是渐近稳定的(即矩阵A为稳定矩阵),那么李雅普诺夫方程\(A^TP+PA=-Q\),对于给定的任意一个正定对称矩阵Q,都有唯一解P
3.1.3. 例子

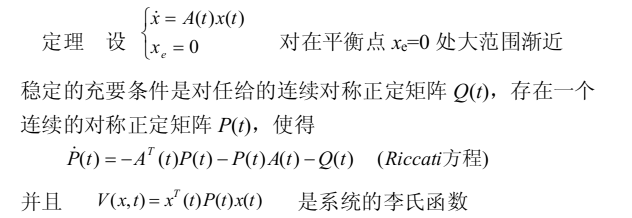
3.2. 线性时变系统(连续)
设有线性时变系统\(\dot{x}=A(t)x(t)\)
3.2.1. 线性时变系统李氏函数的求法
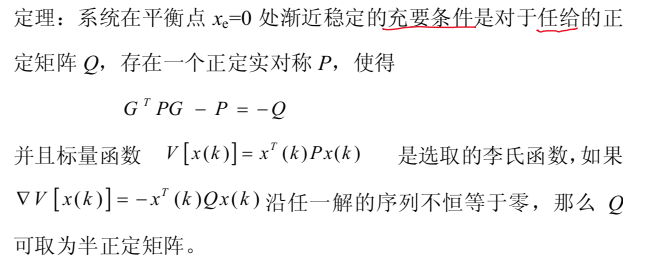
3.3. 线性定常系统(离散)
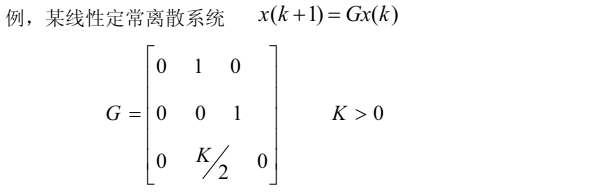
设有线性定常离散系统:
\[ x(k+1)=Gx(k),~~~ x_e=0 \]
3.3.1. 线性定常(离散)系统李氏函数的求法
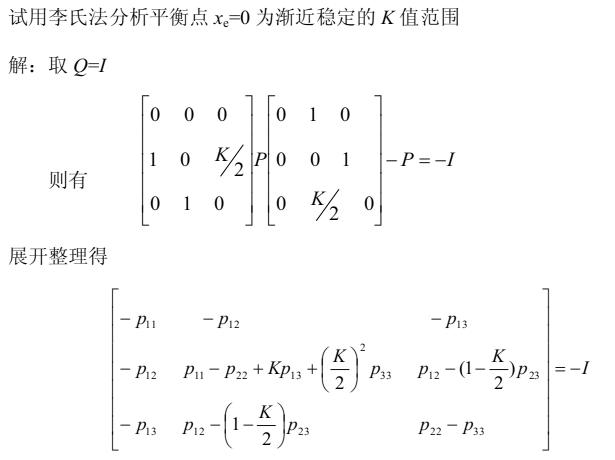
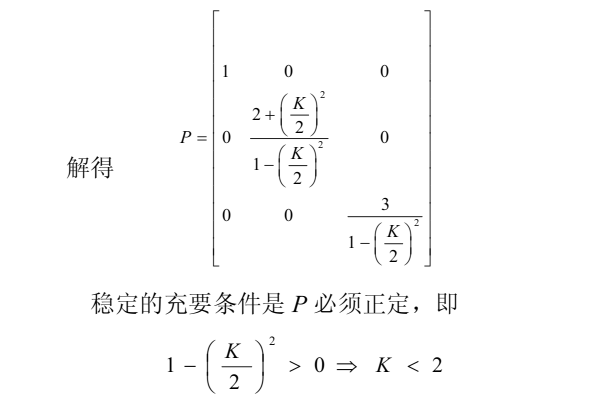
3.3.2. 例子
3.4. 线性时变系统(离散)
设有线性时变离散系统:
\[ x(k+1)=G(k+1,k)x(k) ,~~~~ x_e=0 \]
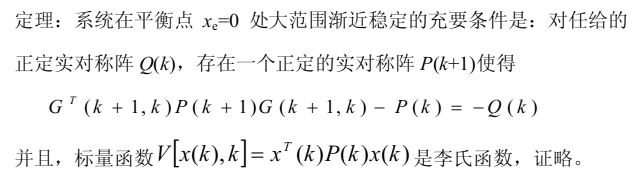
3.4.1. 线性时变(离散)系统李氏函数的求法
4. 问答
4.1. 稳定性的一般定义
4.1.1. BIBO稳定
对与经典的传递函数描述的系统,一般我们讲的稳定指的是BIBO稳定,即有界输入有界输出稳定。

4.1.2. 直观感受

4.2. 线性定常系统稳定的充要条件
4.2.1. 稳定性判据
4.2.1.1. 直接解法
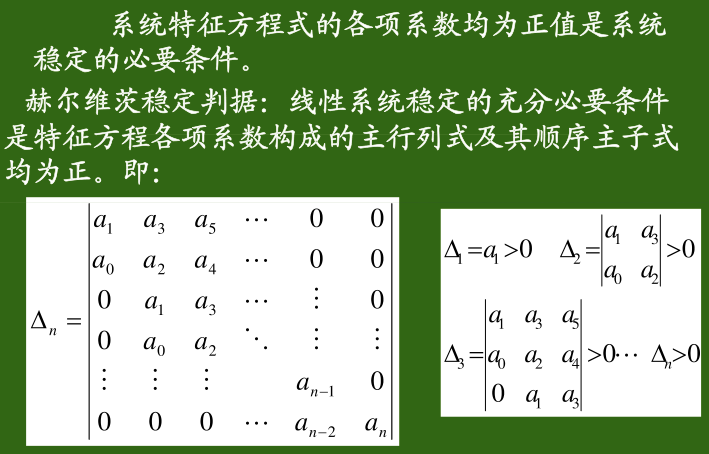
4.2.1.2. 赫尔维茨稳定判据
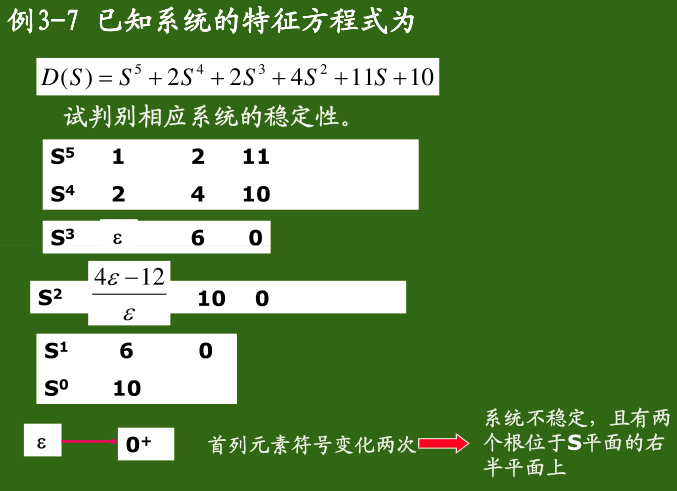
4.2.1.3. 劳斯判据
特殊情况:
- 某一行第一项为0
- 劳斯表出现全零行
4.2.1.4. 奈奎斯特(Nyquist)准则