VINS-Mono-3-初始化和闭环
初始化
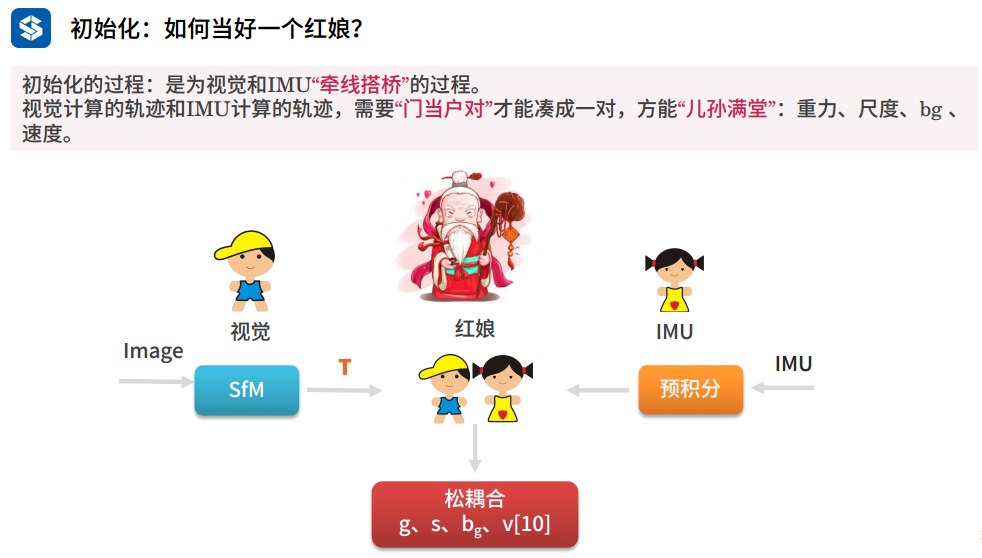
初始化要解决什么问题?
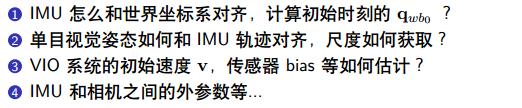
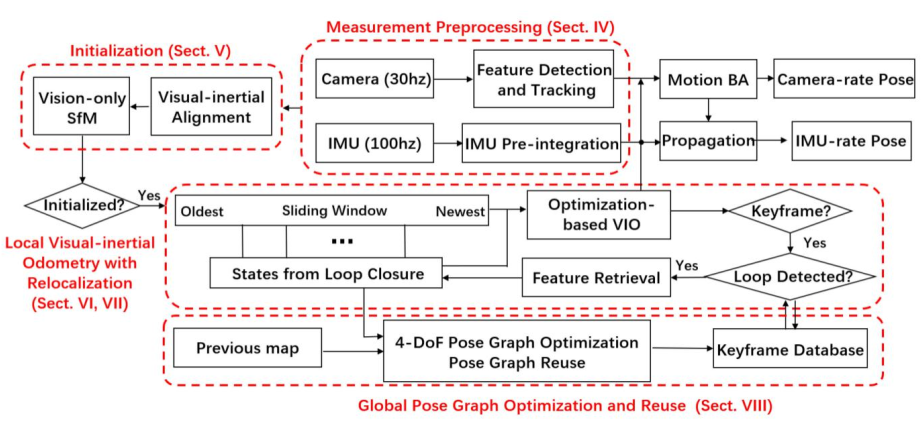
总流程
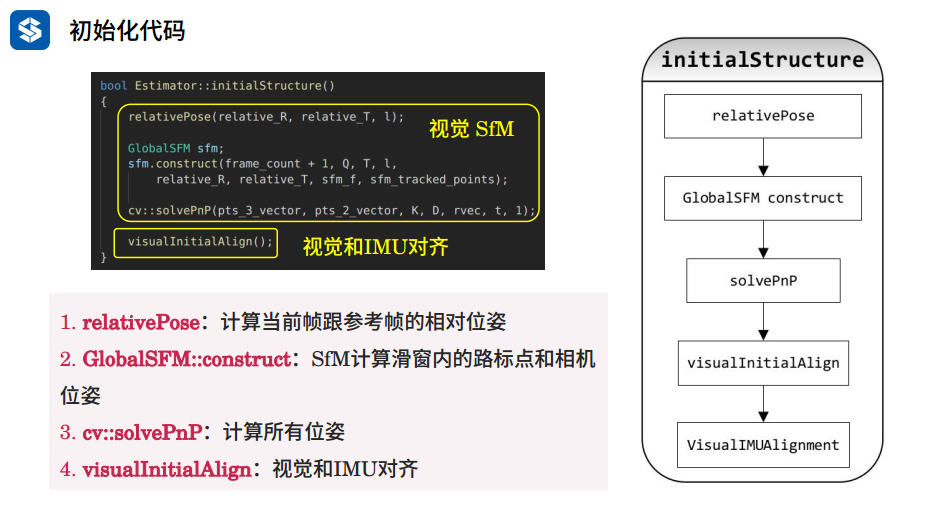
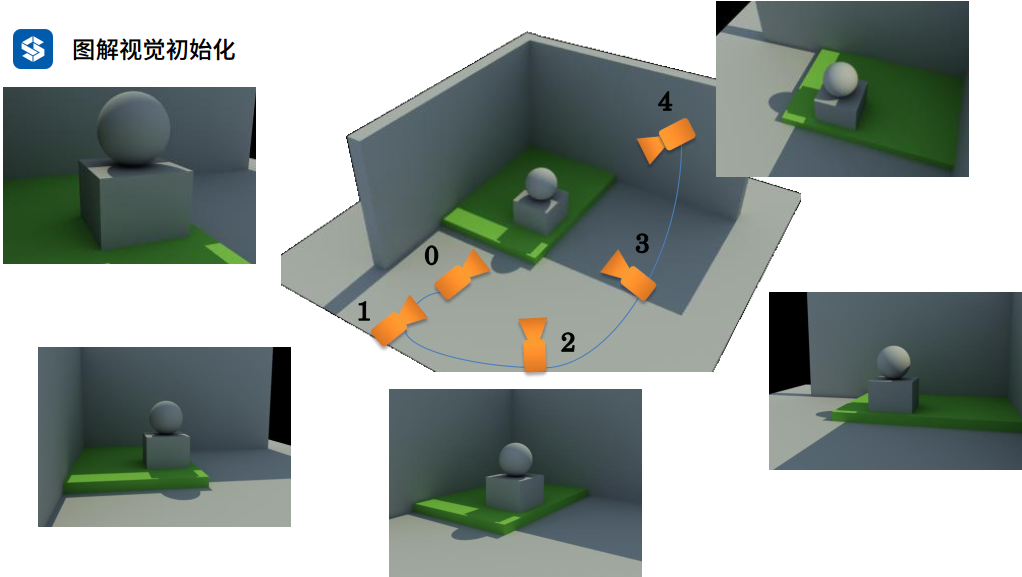
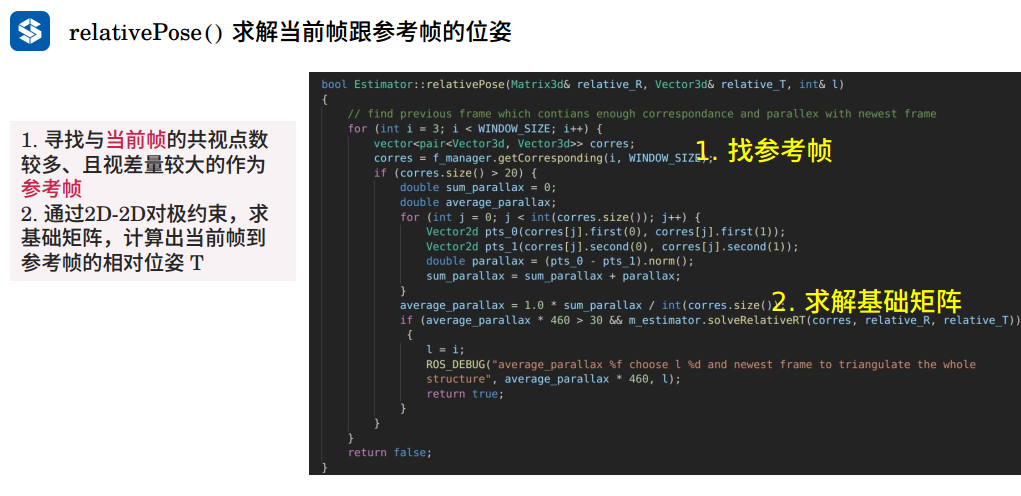
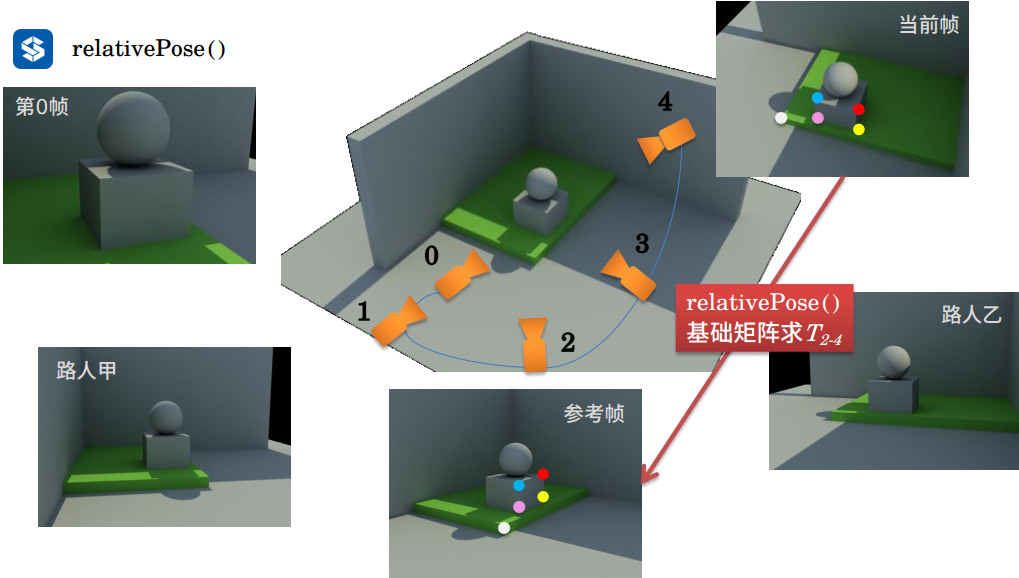
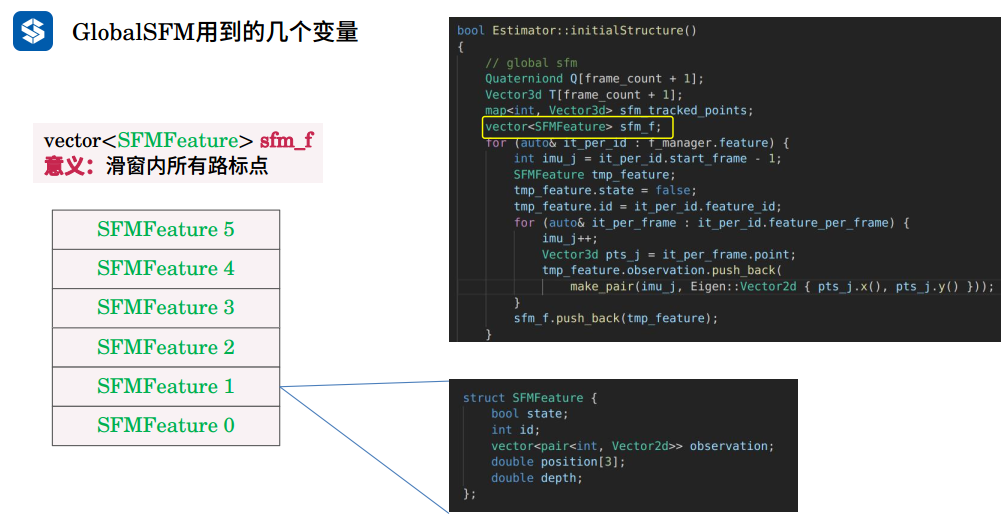
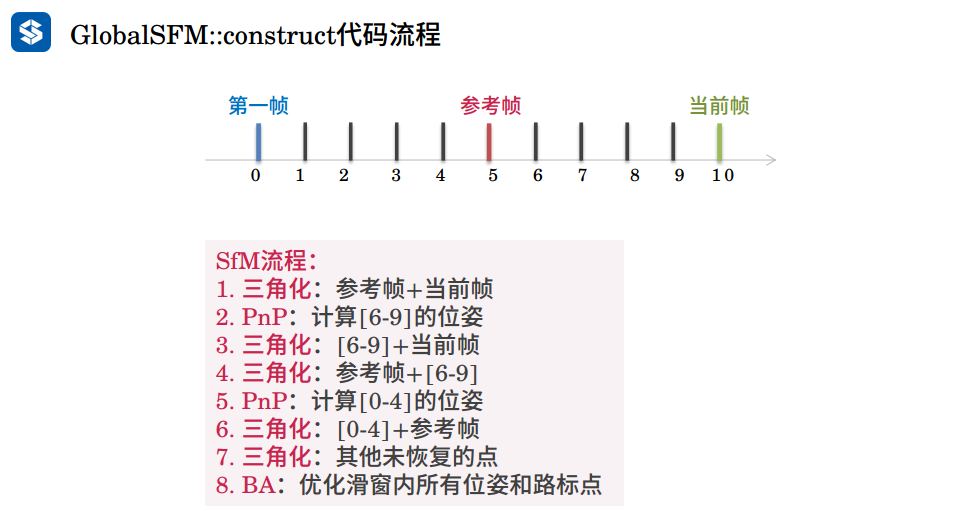
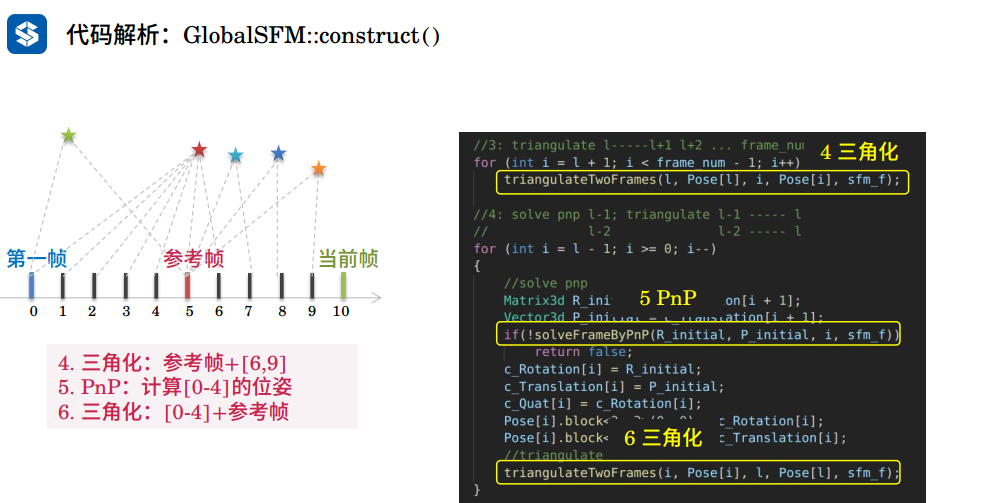
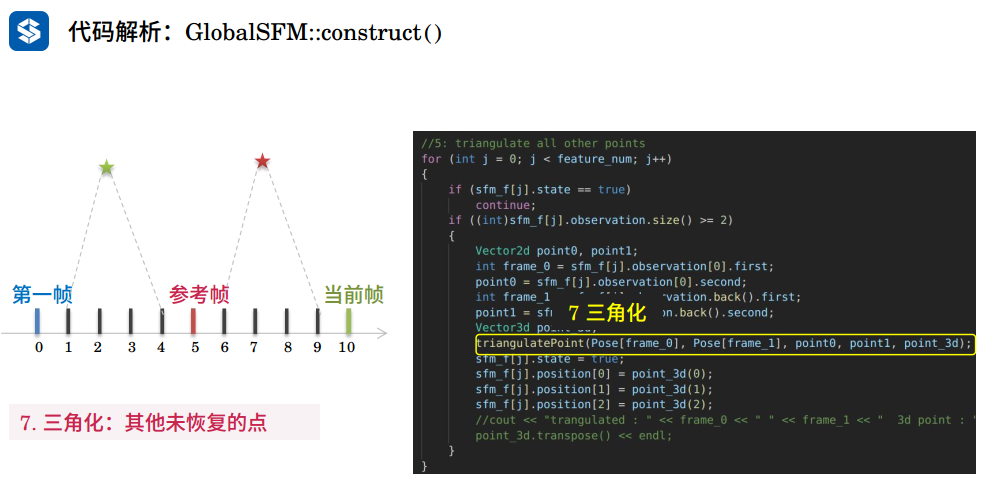
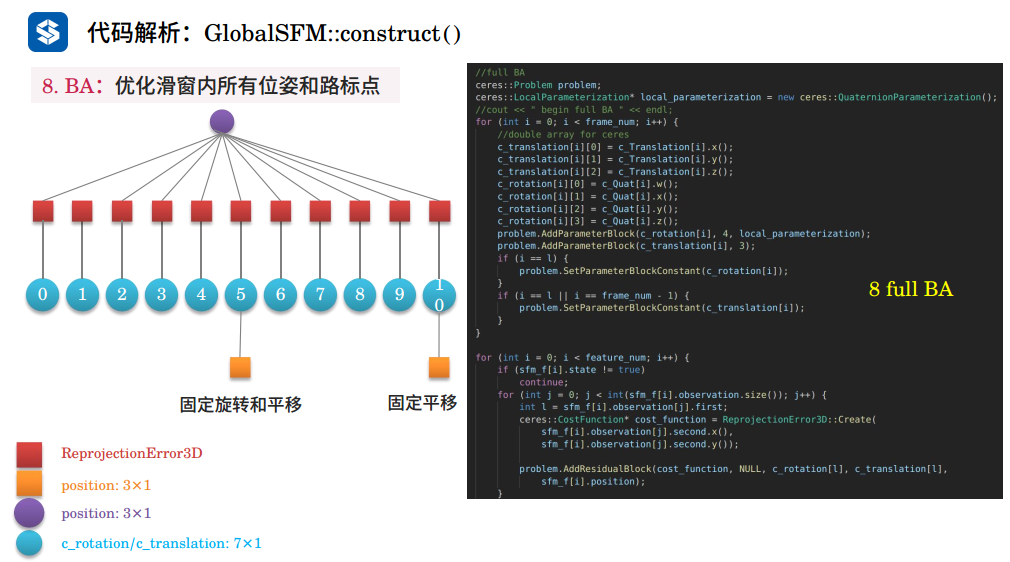
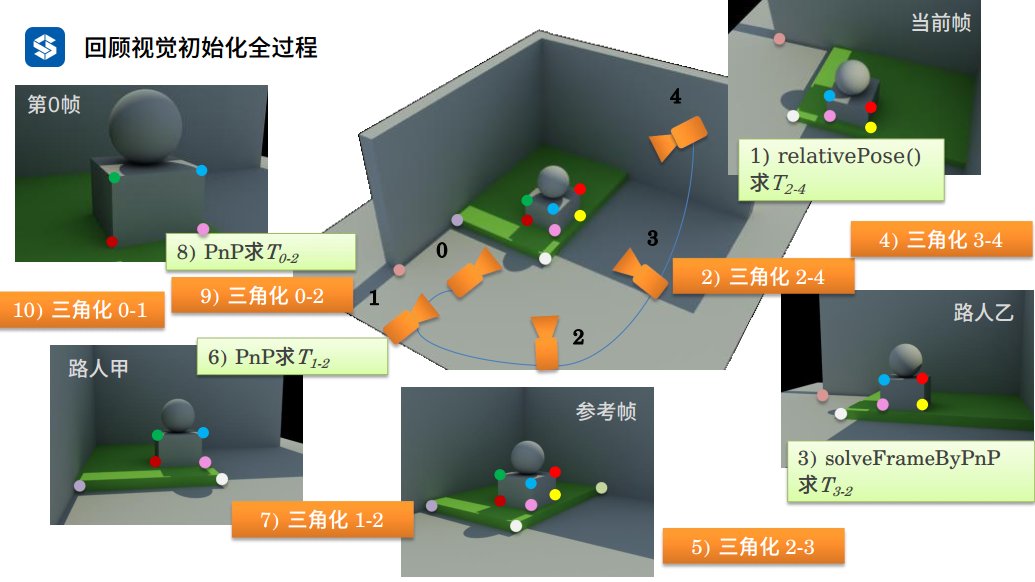
视觉sfm
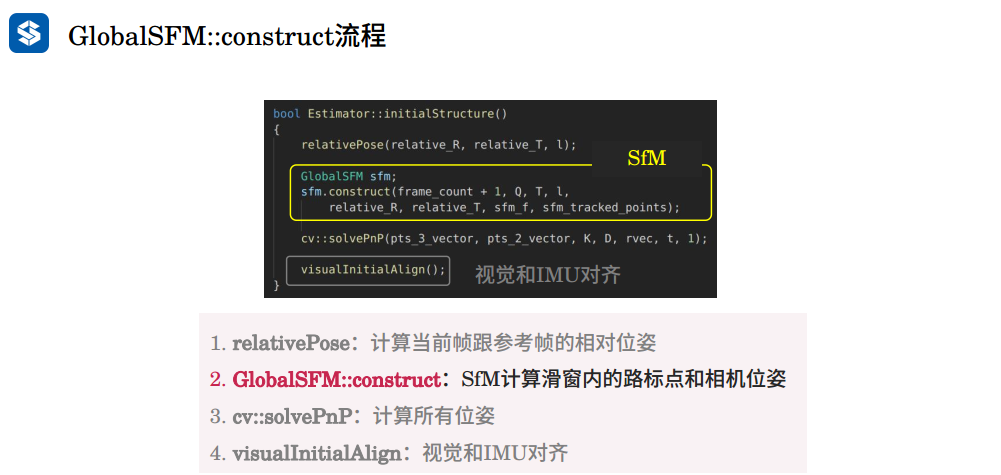


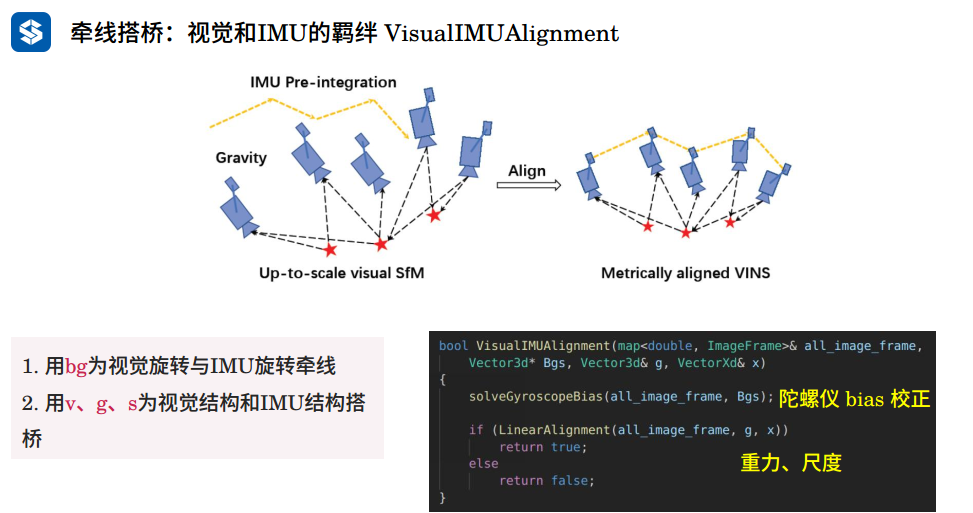
视觉-IMU对齐
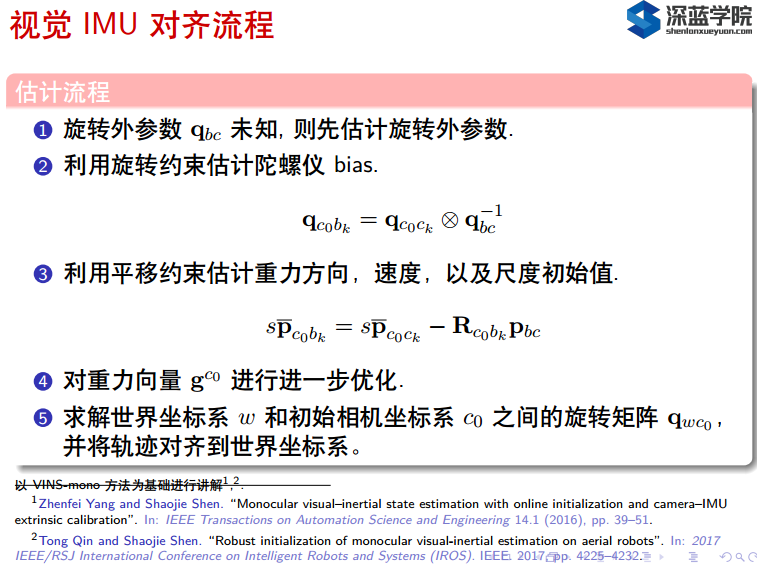
已知条件
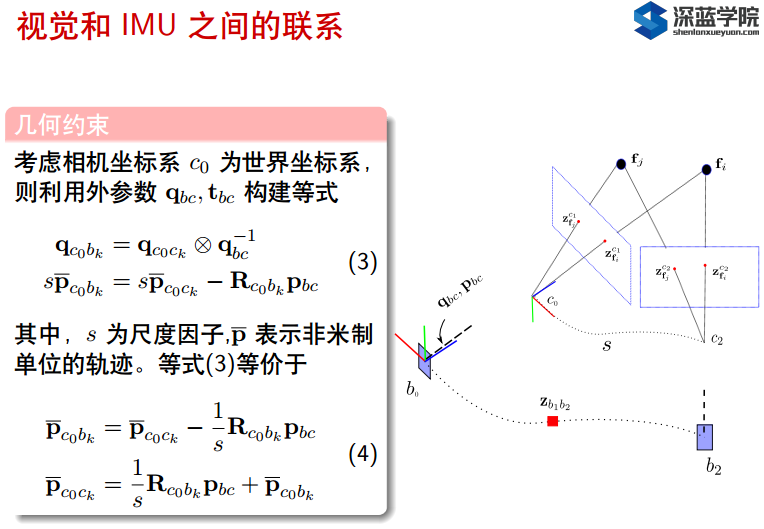
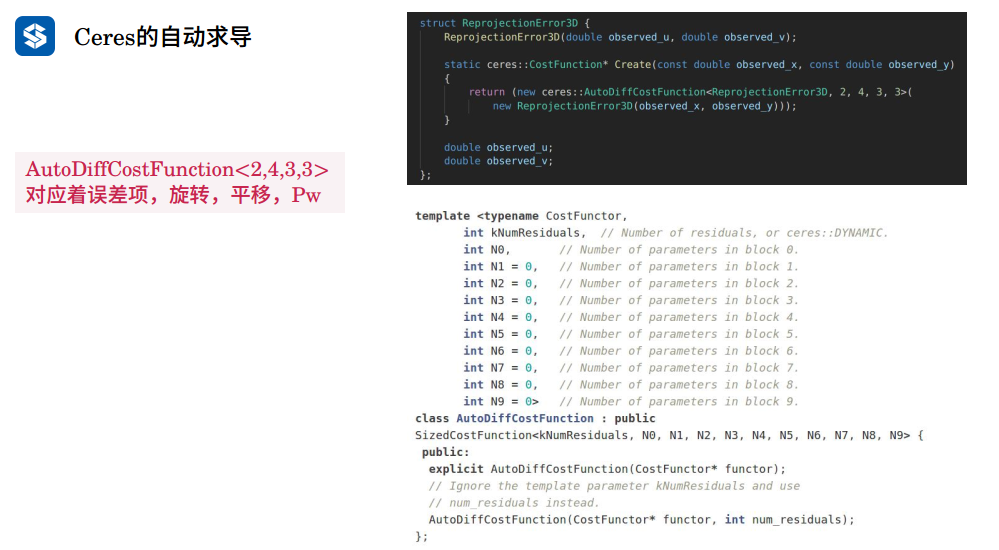
估计旋转外參\(q_{bc}\)
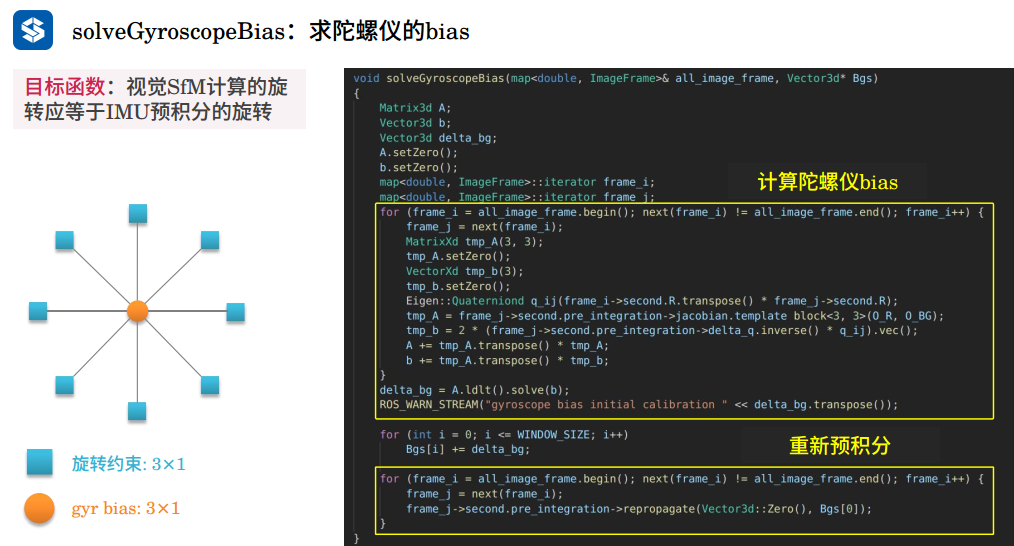
估计陀螺仪bias
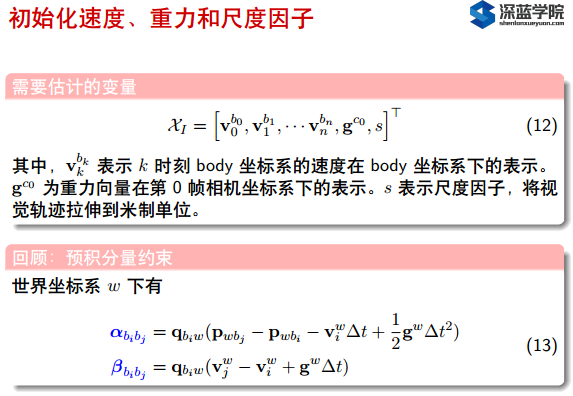
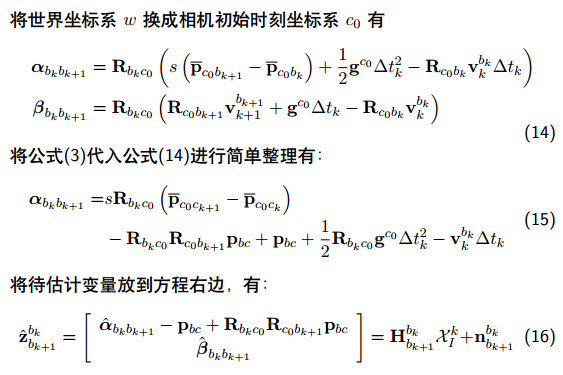
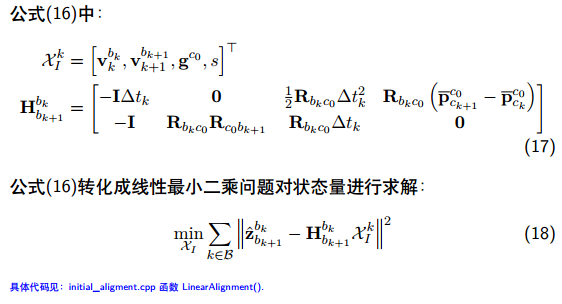
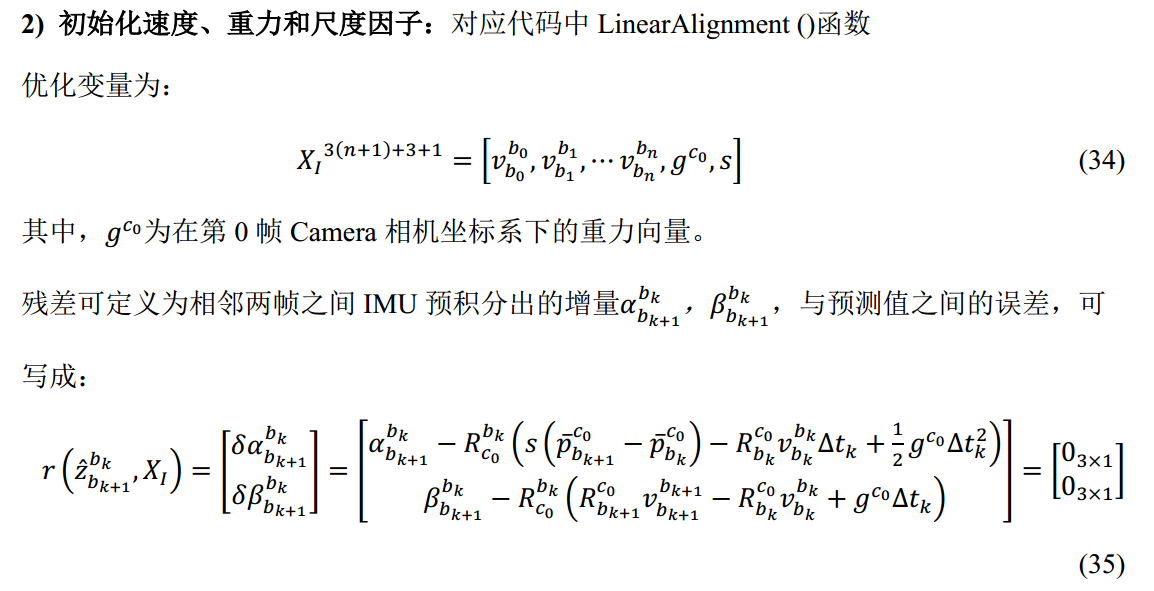
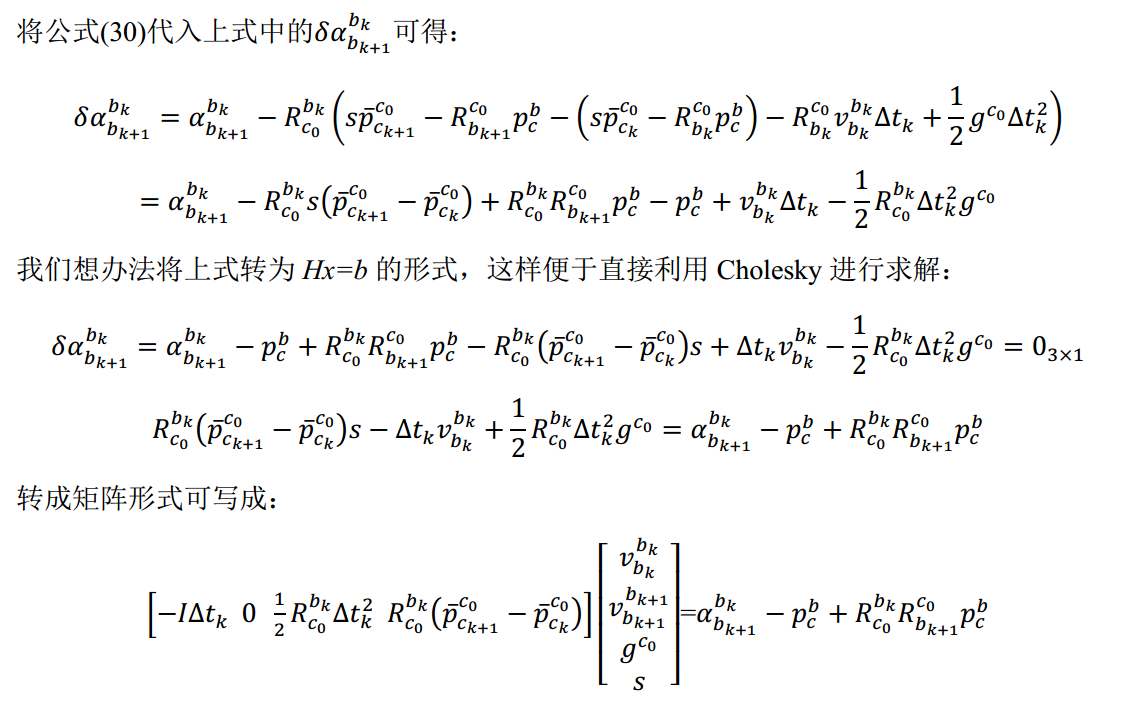
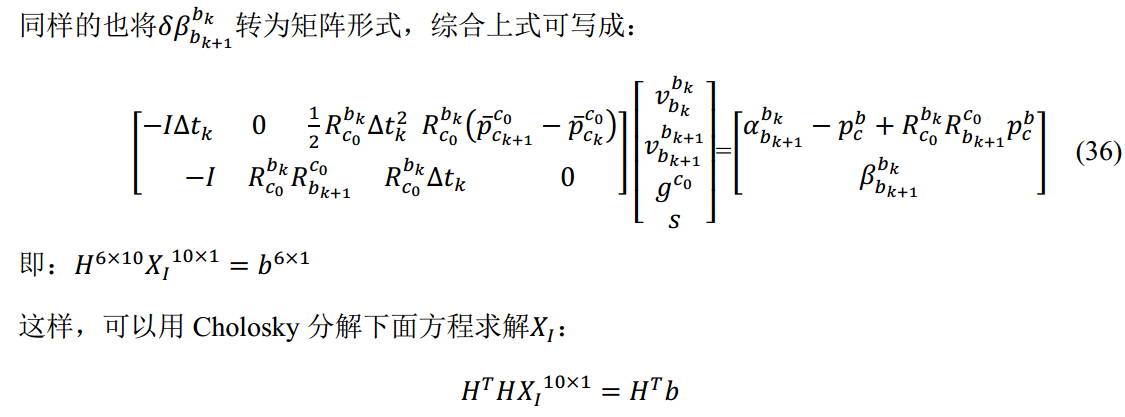
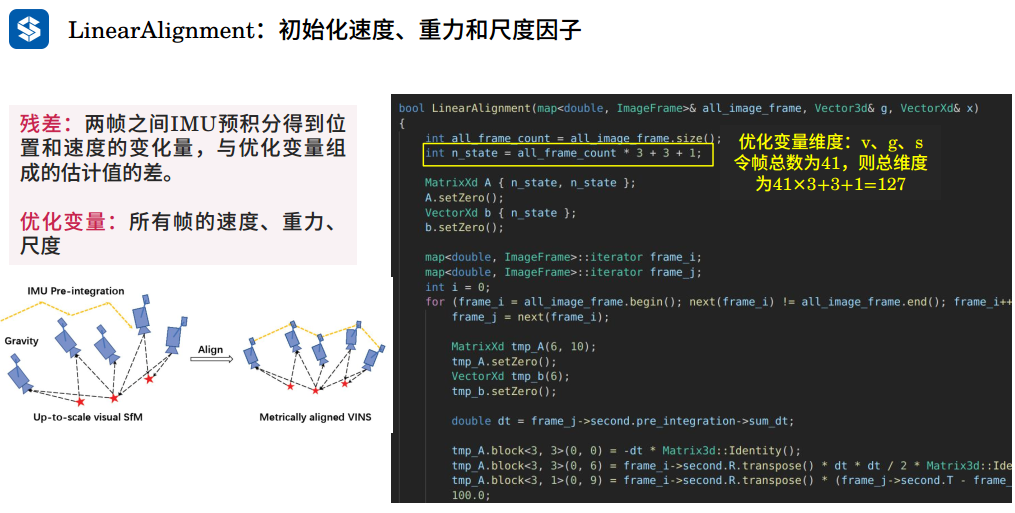
初始化速度、重力向量和尺度因子
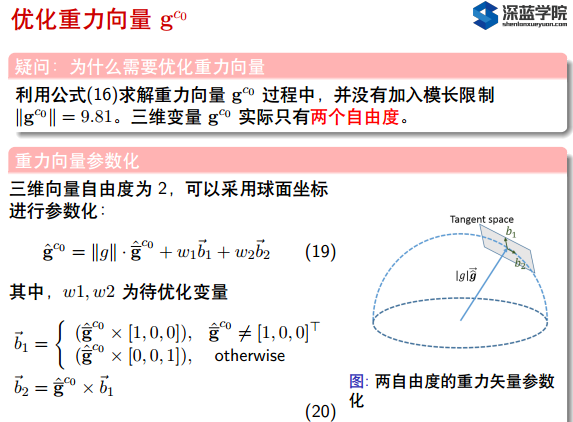
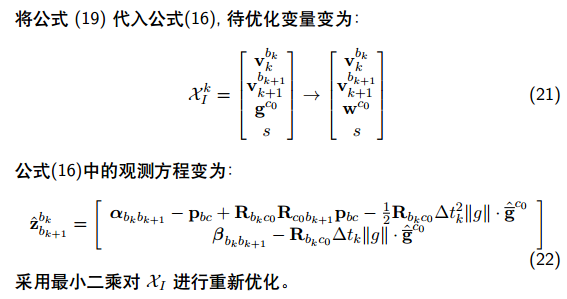
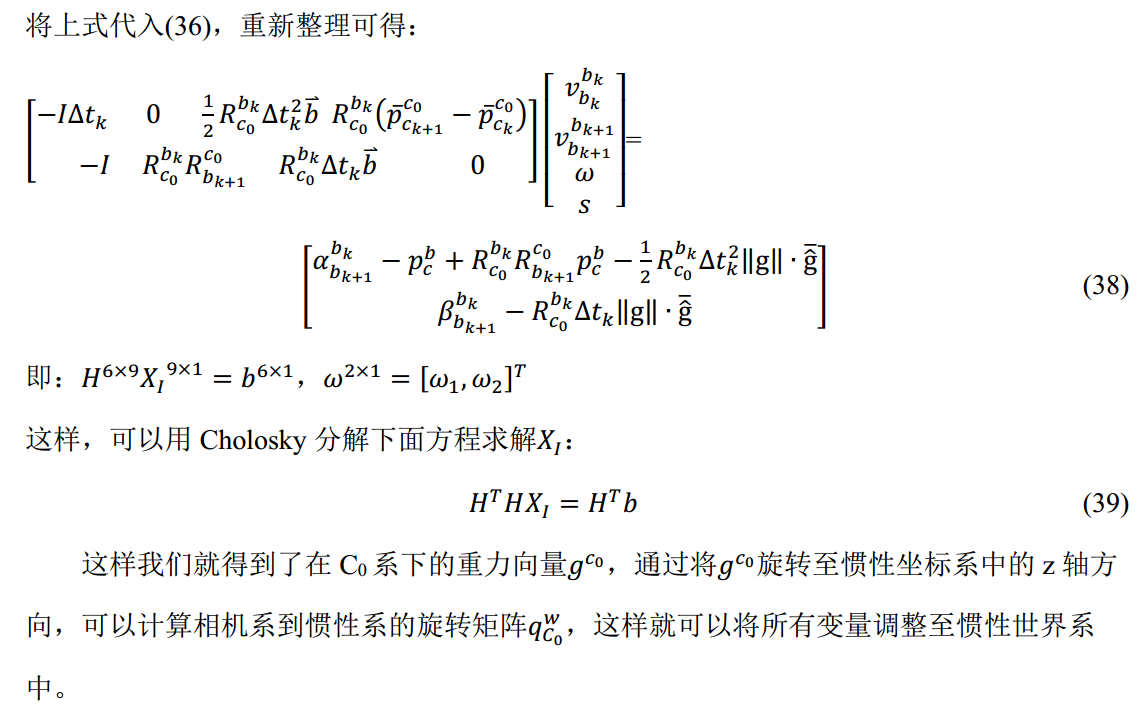
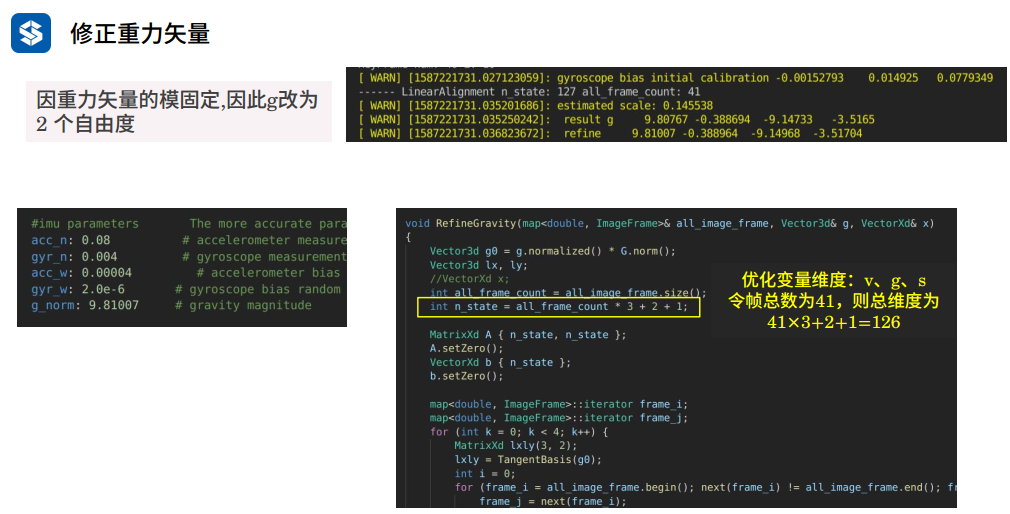
重力向量调优

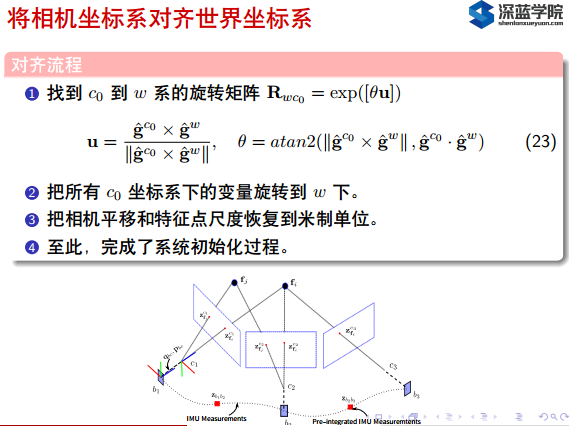
坐标系对齐
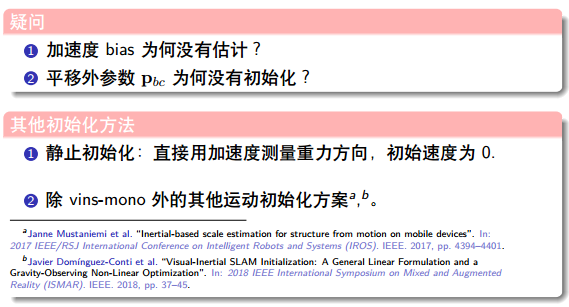
开放性问题
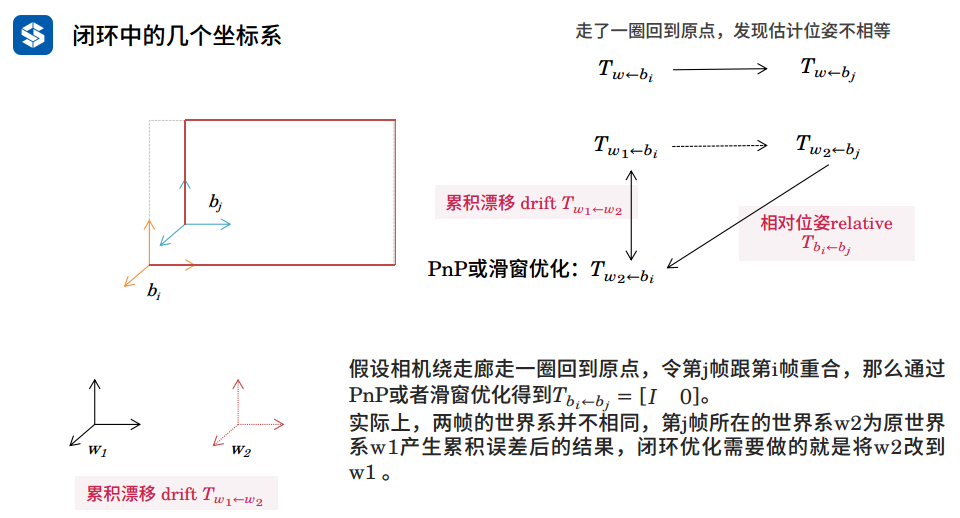
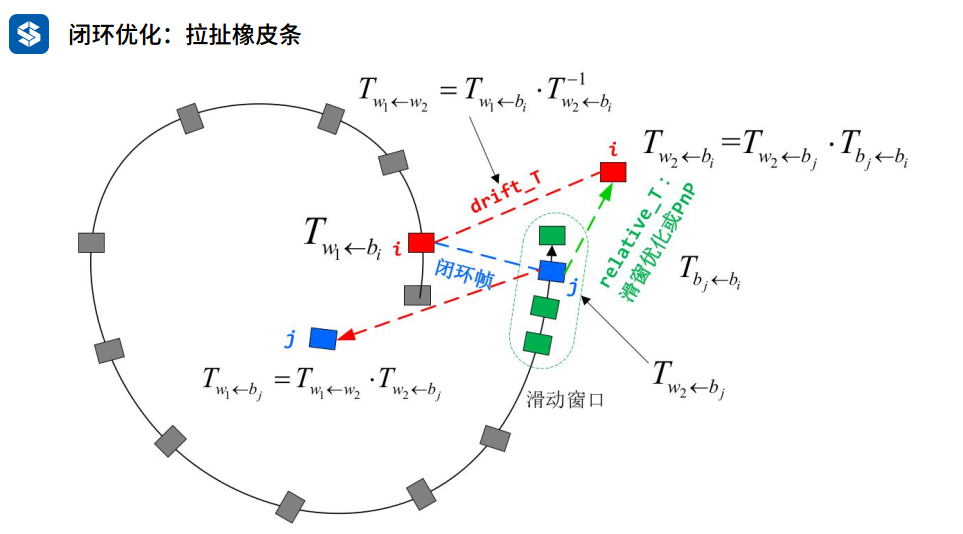
闭环检测
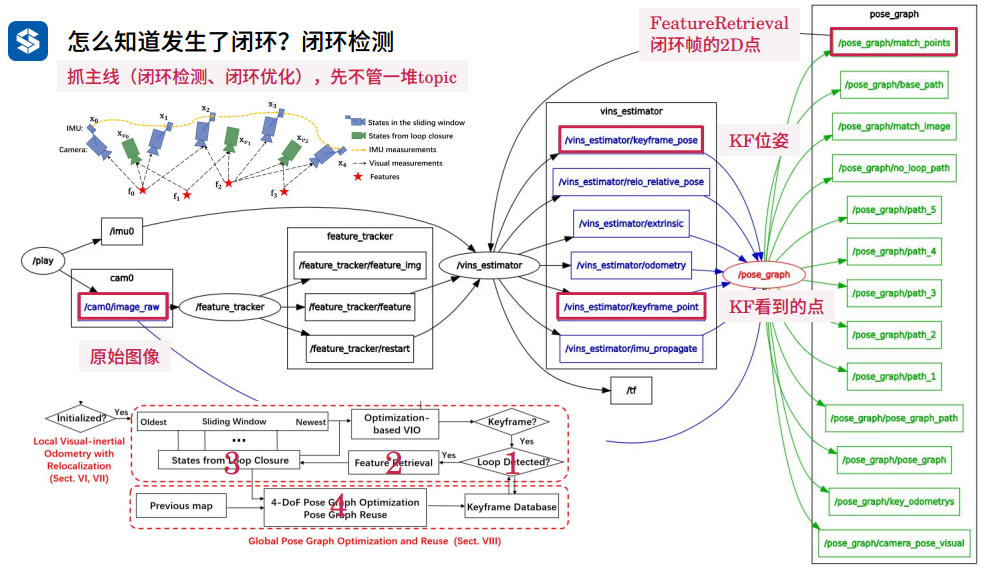
- 闭环检测
- 取原始图像: 为了重新提取特征点,计算描述子
- 取特征点
- 特征恢复
- 建立数据关联: 闭环帧与新帧的特征点关联
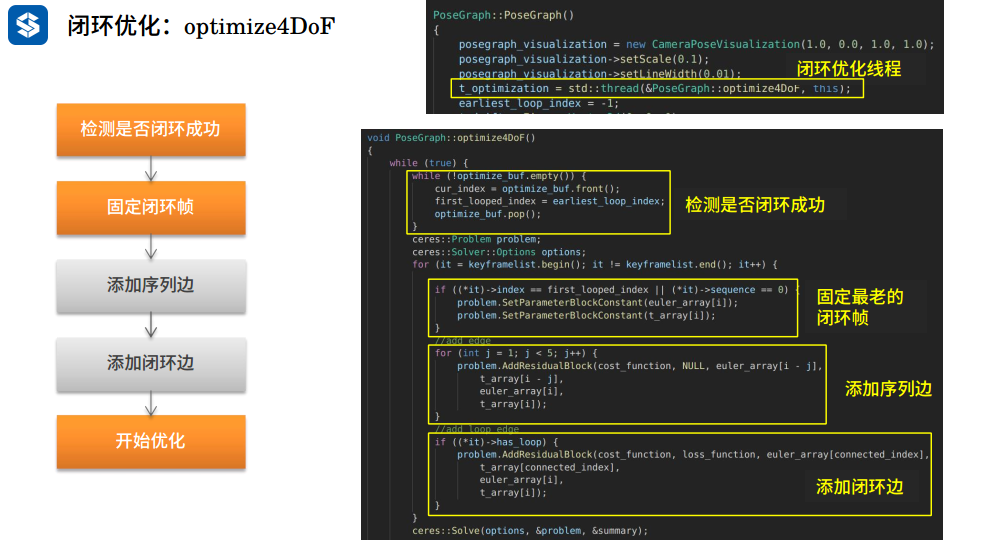
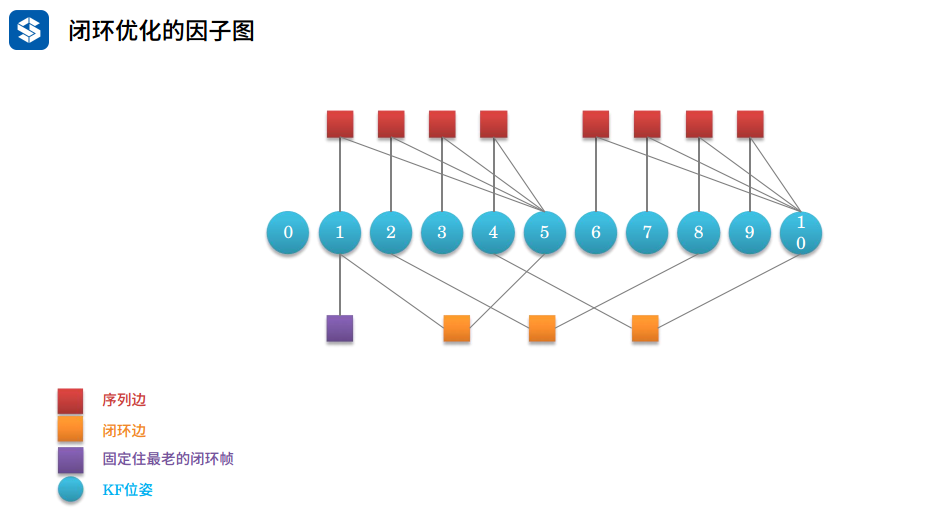
- 计算约束
- 将约束加入Pose Graph
闭环节点


Process()
- 取后端关键帧,创建
KeyFrame对象- 提取已有的特征点描述子
- 提取新的Fast特征点和描述子
- 丢掉原始图像
- 进行闭环检测
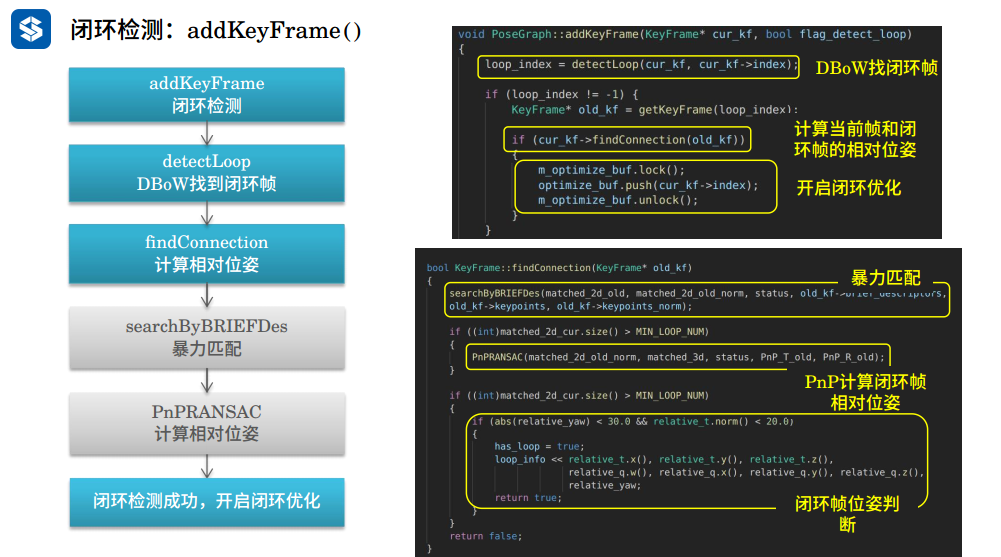
暴力匹配:
- 使用当前帧所有特征点与闭环帧的所有特征点进行暴力匹配,同时匹配会产生大量外点