1. ROS驱动-组合导航-星网宇达M2
这里使用的是Apollo D-Kit套件,采用的是星网宇达公司的M2组合导航。第一步先对组合导航进行设置,第二步是修改ROS社区开源Package nmea_navsat_driver驱动
2. 配置M2
2.1. 清空输出
1 | $cmd,through,usb0,null*ff |
2.2. 航向设置
1 | $cmd,set,headoffset,0*ff |
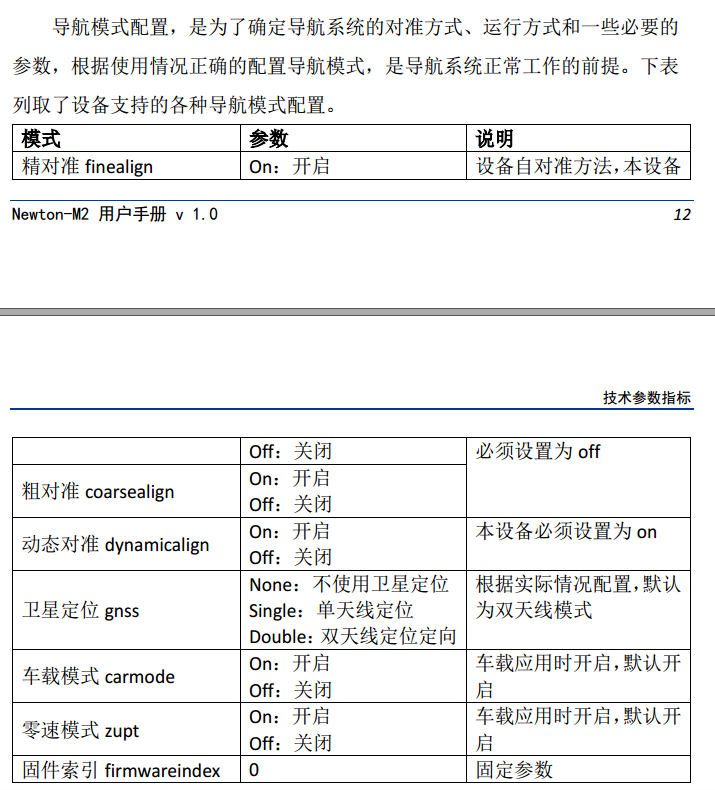
2.3. 检查导航模式
2.3.1. 设置
1 | $cmd,set,navmode,FineAlign,off*ff |
如果不行则试试这个:
2
3
4
5
6
7
>$cmd,set,navmode,corsealign,off*ff (粗对准开/关 设置成 off)
>$cmd,set,navmode,dynamicalign,on*ff (动态对准开/关 设置成 on)
>$cmd,set,navmode,gnss,double *ff (设置成双天线 double)
>$cmd,set,navmode,carmode,on*ff (车载模式开/关 设置成 on)
>$cmd,set,navmode,zupt,on*ff (静止模式开/关 设置成 on)
>$cmd,set,navmode,firmwareindex,0*ff (固件 0/1 除 7660-F01 外都设置成 0
2.3.2. 检查
1 | $cmd,get,navmode*ff |
2.4. 设置杆臂值
1 | 设置命令为: $cmd,set,leverarm,gnss,x,y,z*ff。(xyz 单位为米) |
(如果 PRI 天线安装在 M2 主机的右、前、上, xyz 则为正,反之 xyz 前面需加负号-)
2.5. 设置输出
指令格式:
$cmd,output,comX,cmdname,rate*ff
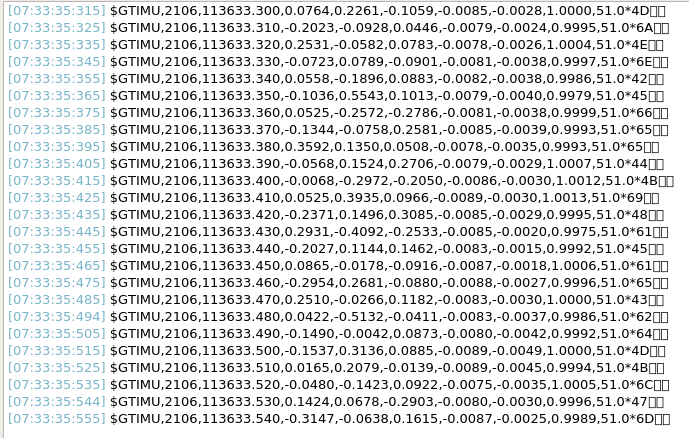
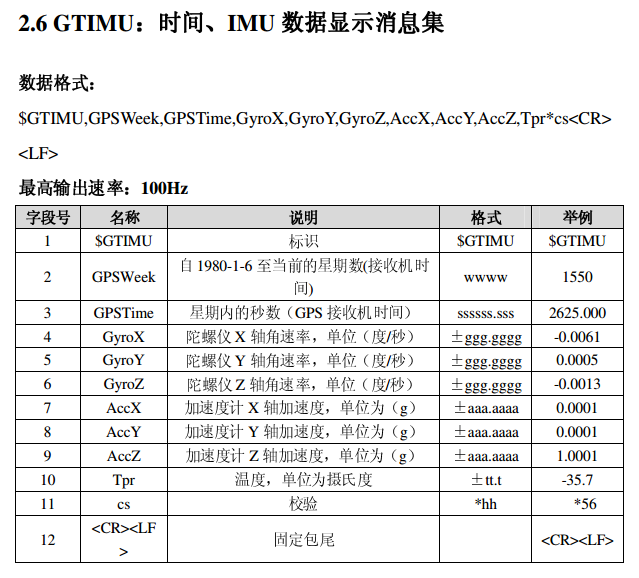
2.5.1. 输出IMU原始数据GTIMU
1 | $cmd,output,usb0,gtimu,0.01*ff |
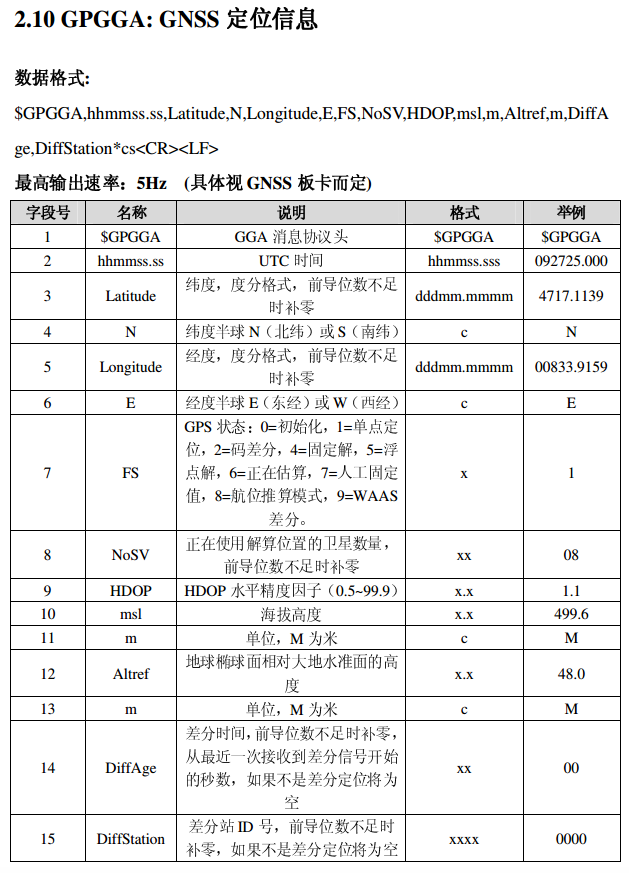
2.5.2. 输出RTK定位信息GPGGA语句
1 | $cmd,output,usb0,gpgga,0.2*ff |

2.5.3. 输出融合之后的定位信息GPFPD语句
1 | $cmd,output,usb0,gpfpd,0.01*ff |
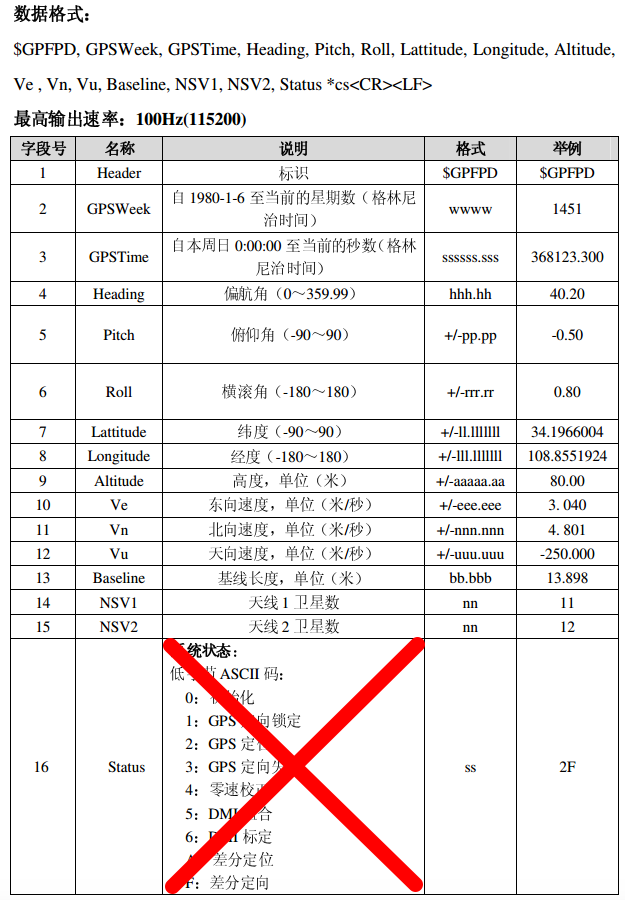
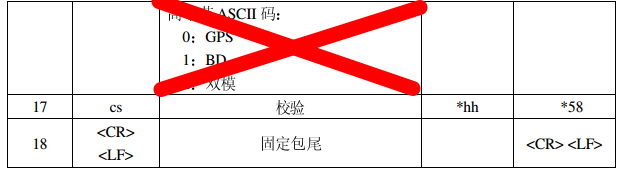
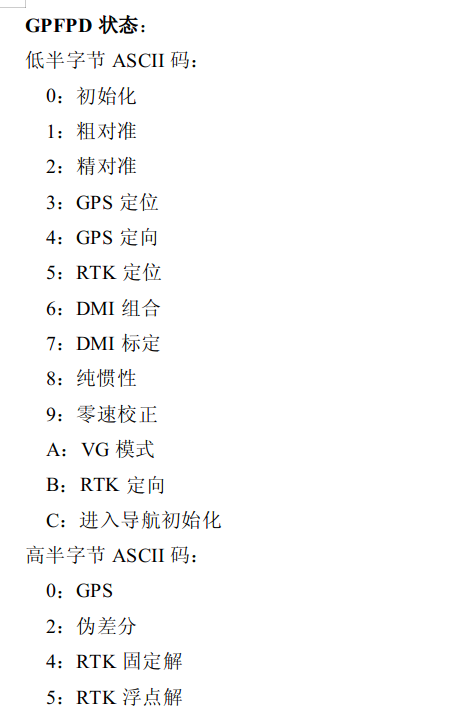
GPFPD状态输出为4B的时候,表明RTK正常
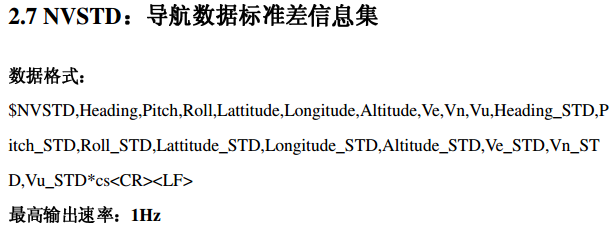
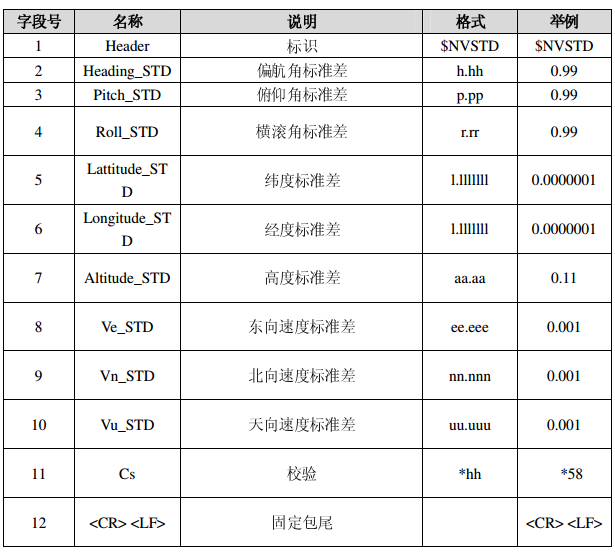
2.5.4. 输出融合之后的标准差(协方差)
1 | $cmd,output,usb0,nvstd,0.2*ff |

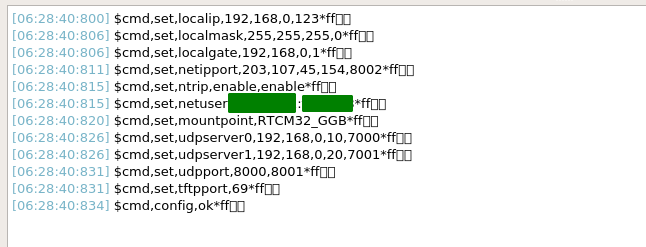
2.6. 设置RTK
1 | $cmd,set,localip,192,168,0,123*ff |
2.6.1. 检查
1 | $cmd,get,netpara*ff |
2.7. 设置PPS授时输出
1 | ppscontrol enable positive 1.0 10000 |
2.8. 保存设置
1 | $cmd,save,config*ff |
ROS驱动代码
已上传至GitHub
https://github.com/qpc001/M2_navsat_driver