Catalogue
Complex urban dataset with multi-level sensors from highly diverse urban environments

摘要
提供了数据集地址: http://irap.kaist.ac.kr/dataset.
- 提供多环境多场景的数据,如市区,公寓,或者是地下停车场
- 提供了以高精度导航传感器和半自动回环处理的SLAM算法的定位基准
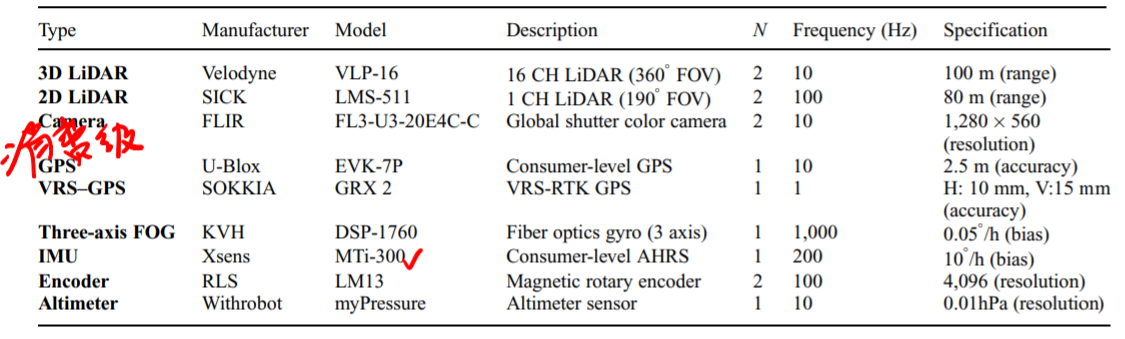
- 提供两个级别准确度的传感器数据(商用和消费级别)
- 提供3D点云(LAS格式)以及相应的viewer
- 提供ROS下的开发者工具
介绍
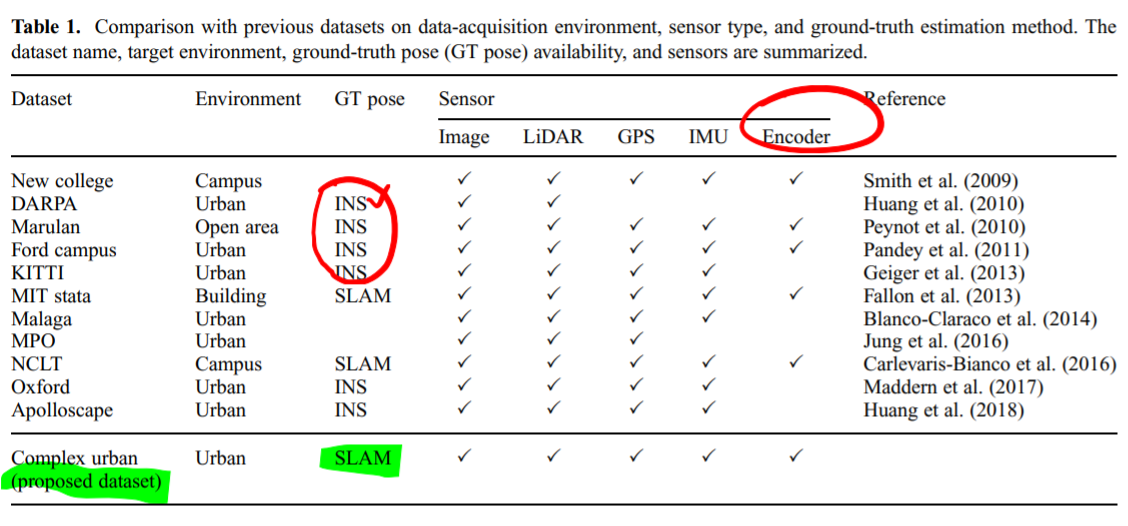
下表展示了最近的一些自动驾驶或3D mapping的数据集
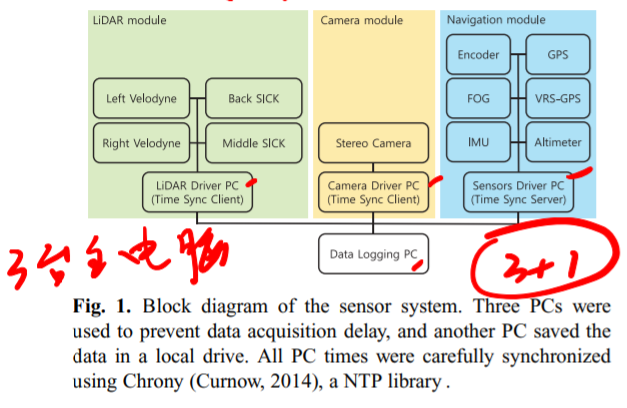
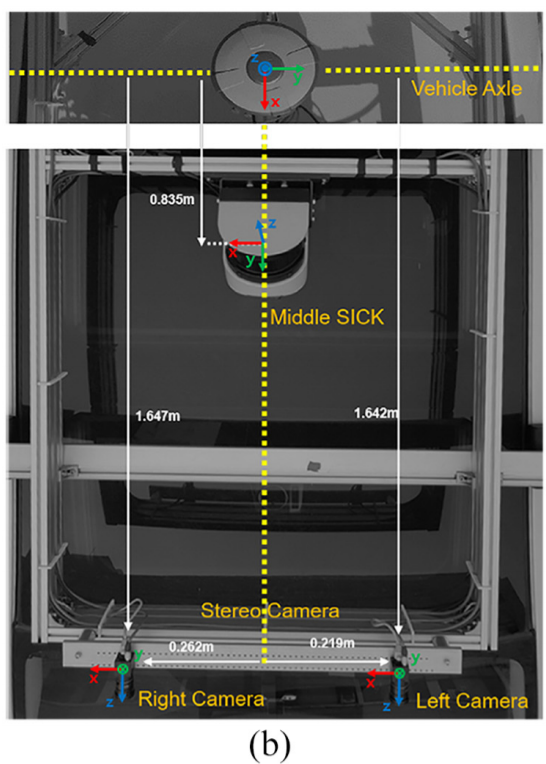
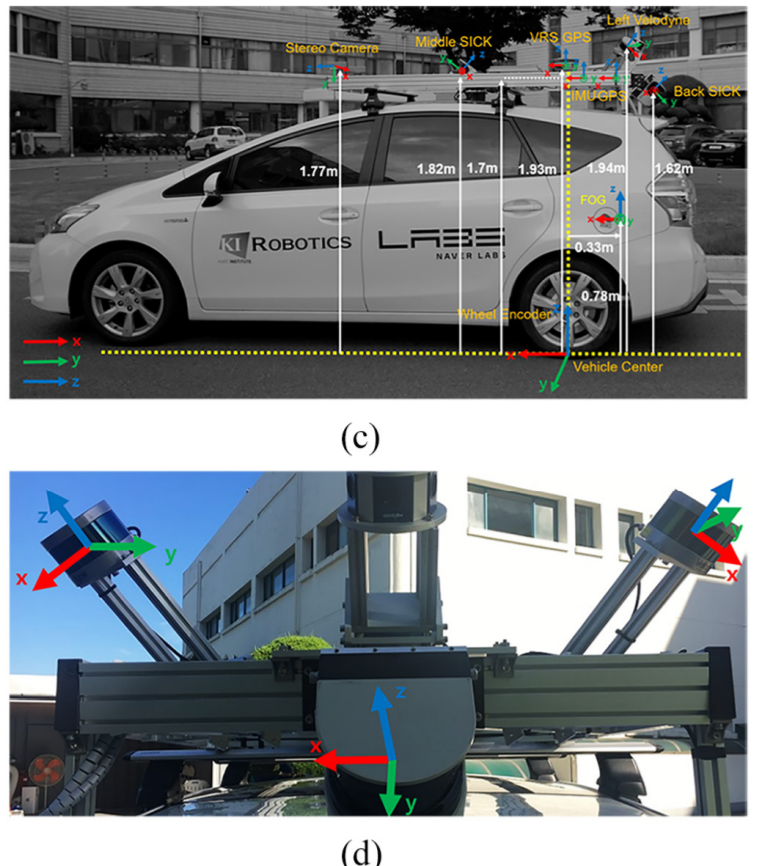
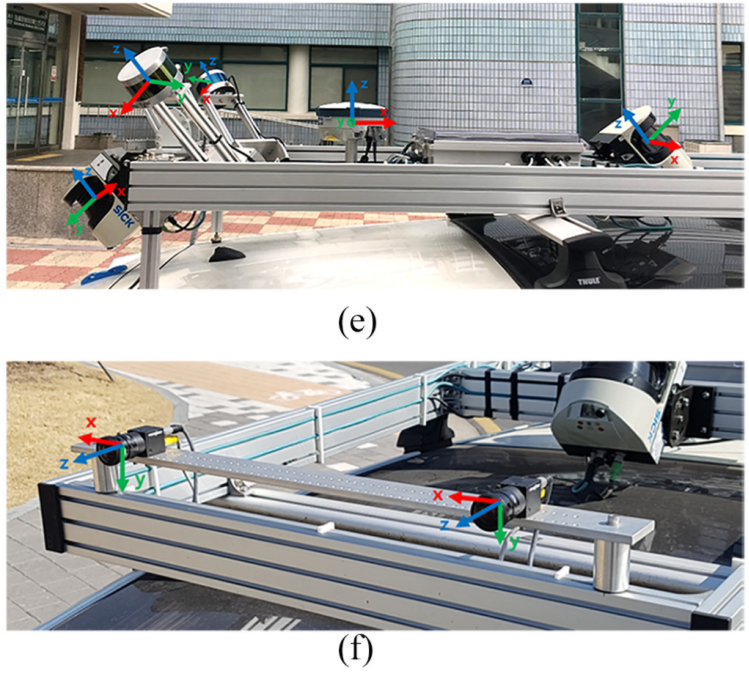
系统概述
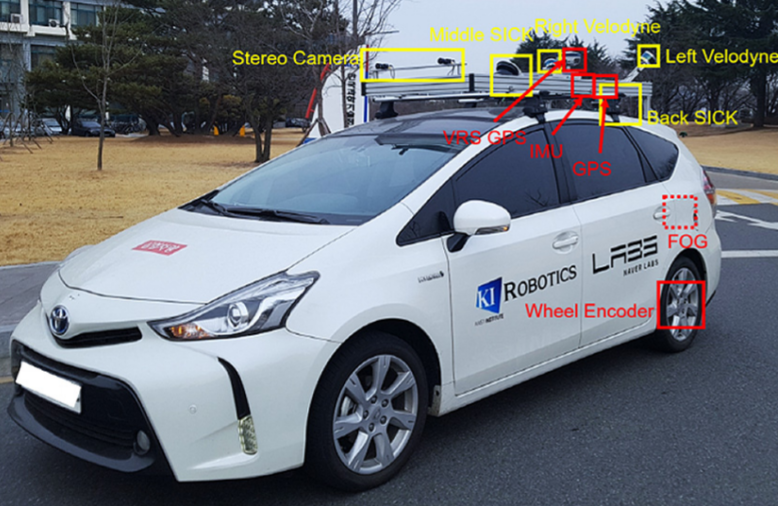
传感器坐标系
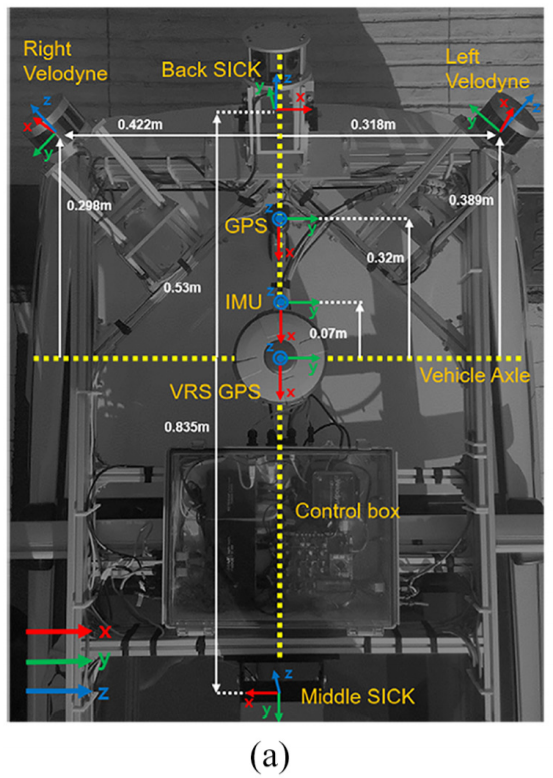
激光雷达与车体坐标系外参标定
- 先根据不同激光雷达的外参关系,将不同激光雷达的点云拼接起来
- 因为标定过程是在一个平面(地面)上进行的,因此,当车体中心在地面上时,点云在地面上的高度应该为0。因此,通过调整拼接后的点云的高度为0,可以计算出两个3D激光雷达在车体参考坐标系下的roll,pitch和z值
- 首先,使用RANSAC算法通过拟合平面来提取地面上的点
- 然后,使用SVD分解求出激光雷达相对于车体坐标系的roll,pitch和z值
- 对于x,y和yaw值,在空地上控制车辆往返运动,然后从两个相反的视点比较场景,在这个过程中,用到了VRS-GPS和光纤陀螺等高精度的设备。这个过程中,车辆的精确位置主要有VRS-GPS提供,通过对3D点云进行对齐来得到待估计的x,y和yaw值