Catalogue
基于滤波的融合方法
基于误差状态的滤波方法(基于角误差)
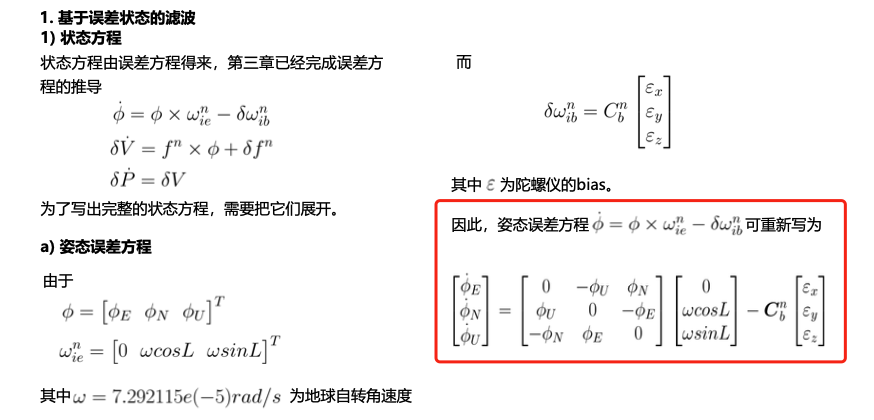
姿态误差方程
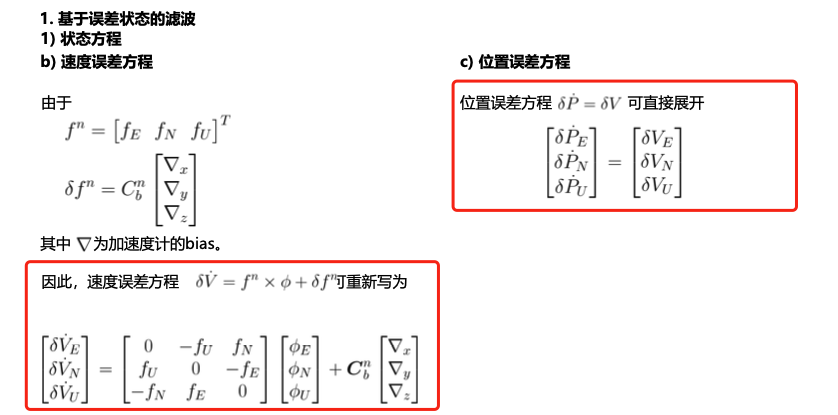
速度误差方程、位置误差方程
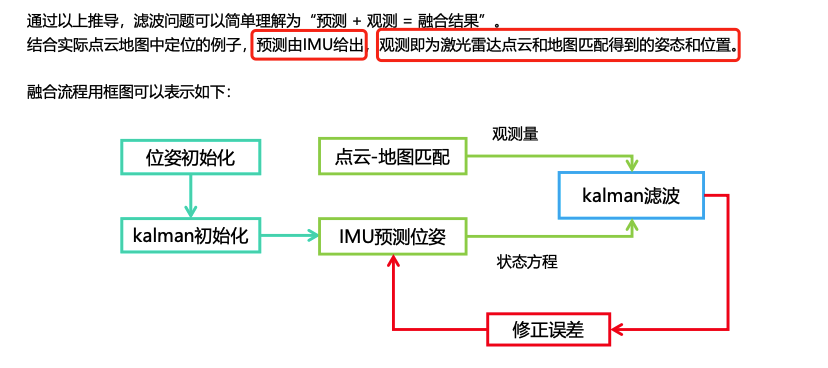
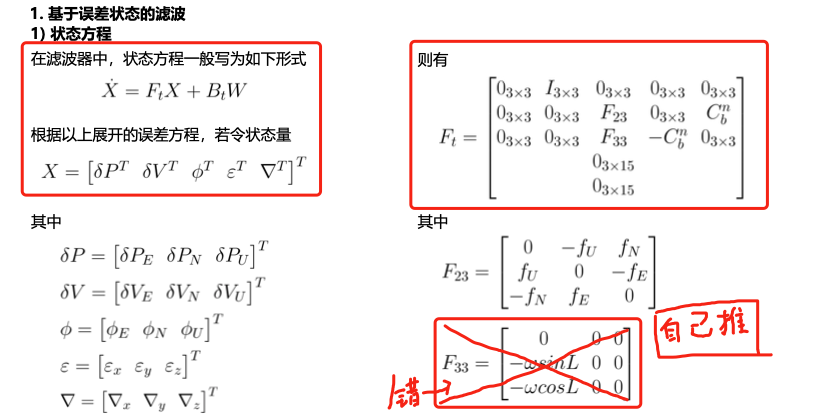
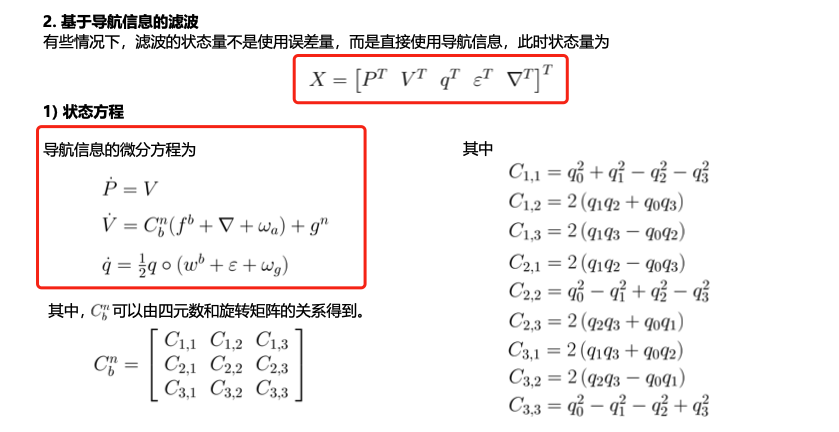
状态方程(预测)
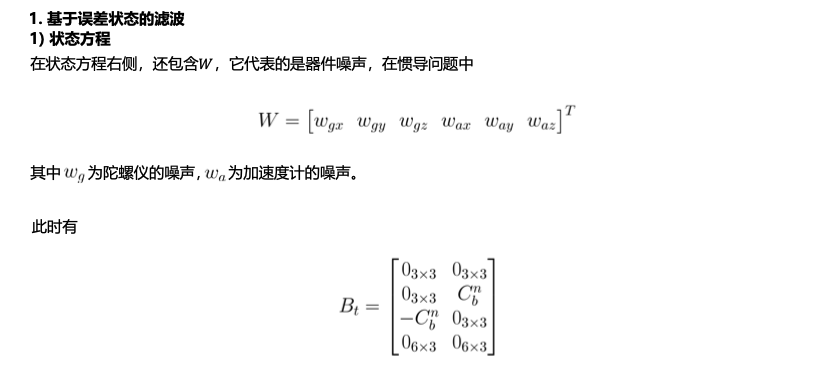
- \(B_t\)来源于\(F_t\)的后两列,二者等价,因为bias和噪声传入的通道是同一个
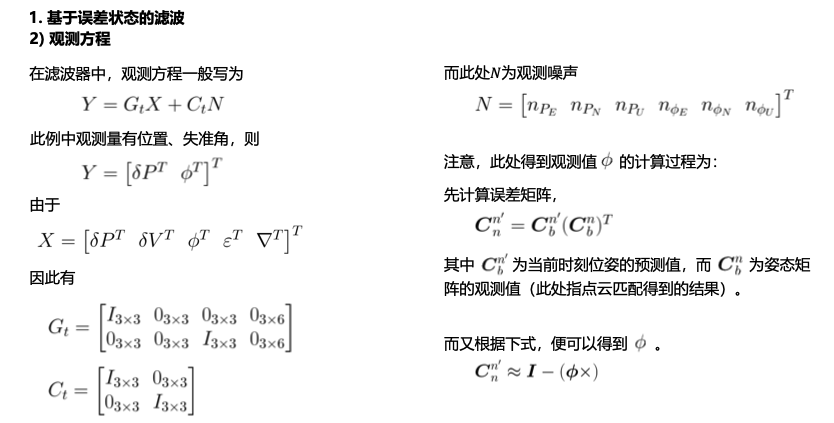
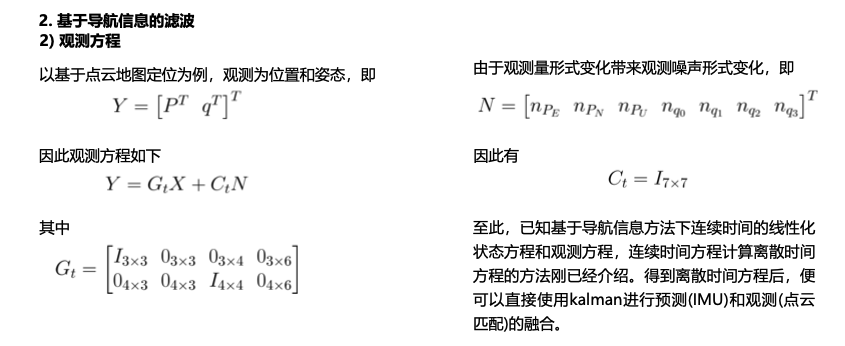
观测方程
离散化
- 因为观测方程不是微分方程,因此不需要离散化
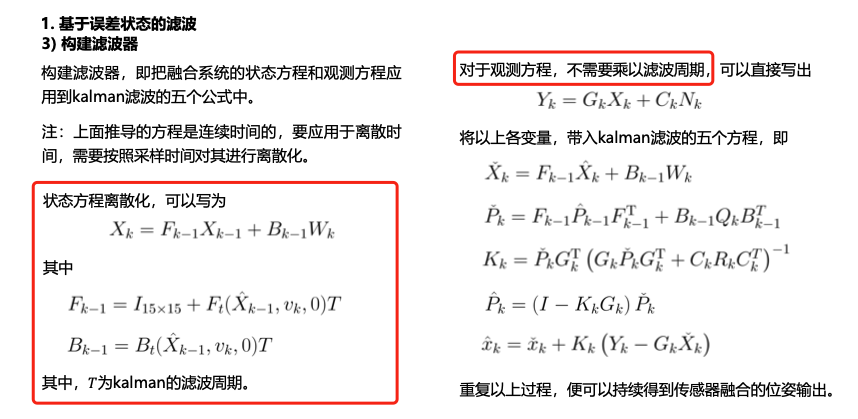
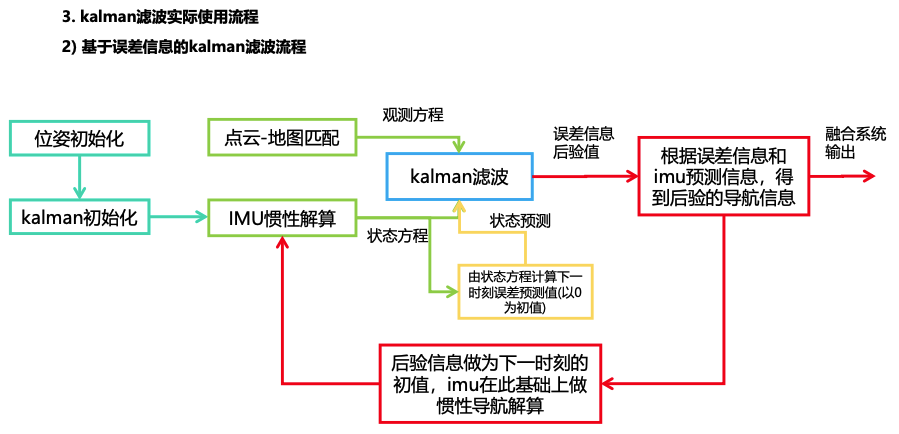
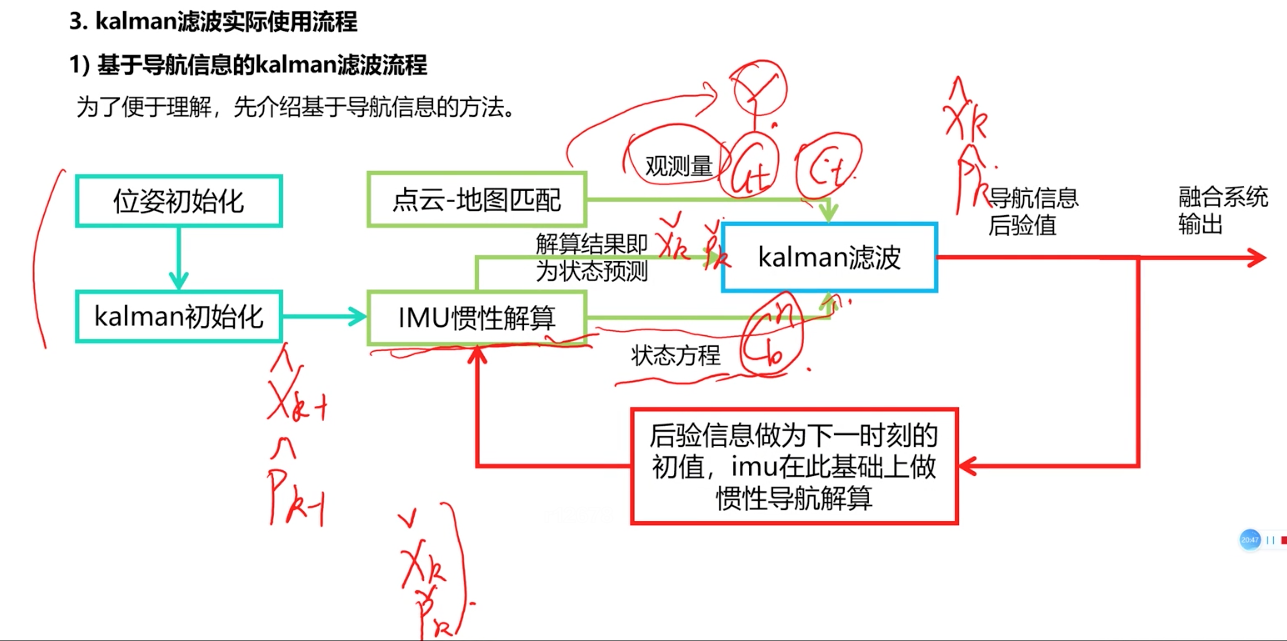
滤波流程
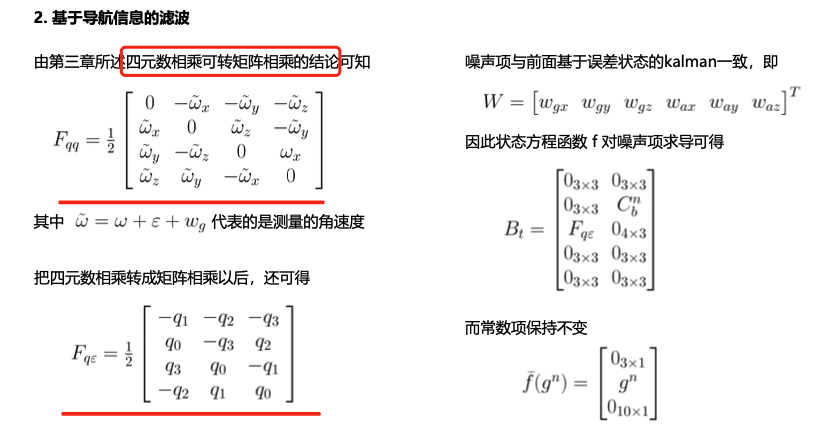
基于四元数状态的滤波
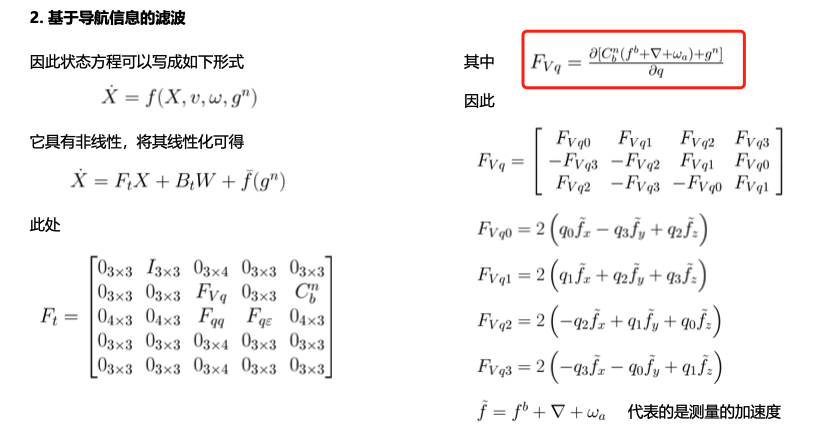
- 上图中圈中的\(F_{Vq}\) 表示的是速度状态对姿态项\(q\)的各个分量的求导
- 另外,\((f^b+\triangledown+\omega_a)\)实际上就是加速度计的输出值(读数)
滤波流程
基于误差状态的滤波器与普通状态滤波器对比