Catalogue
基于滤波器的融合算法-进阶
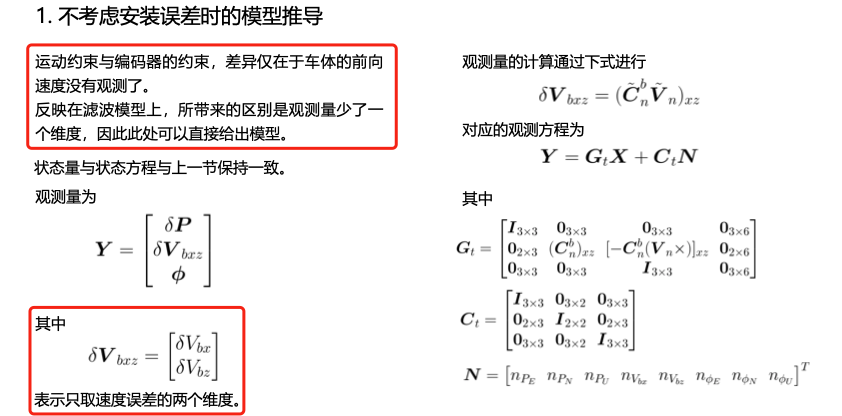
编码器融合
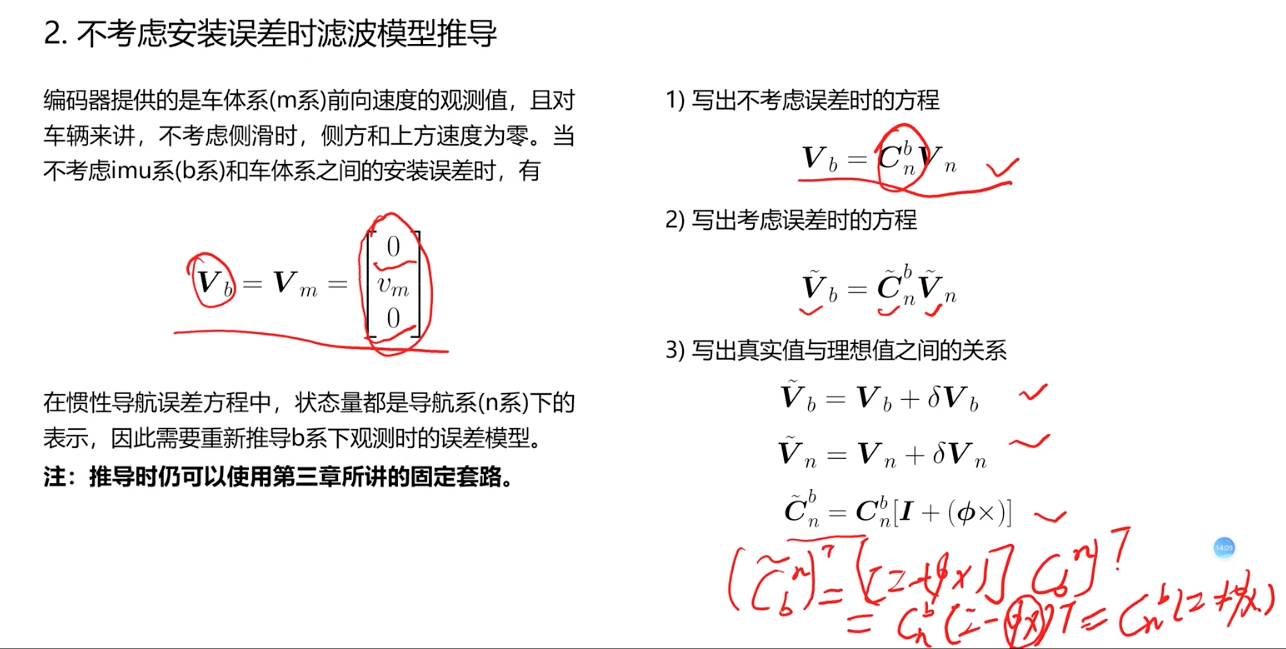
不考虑imu和车体之间的旋转
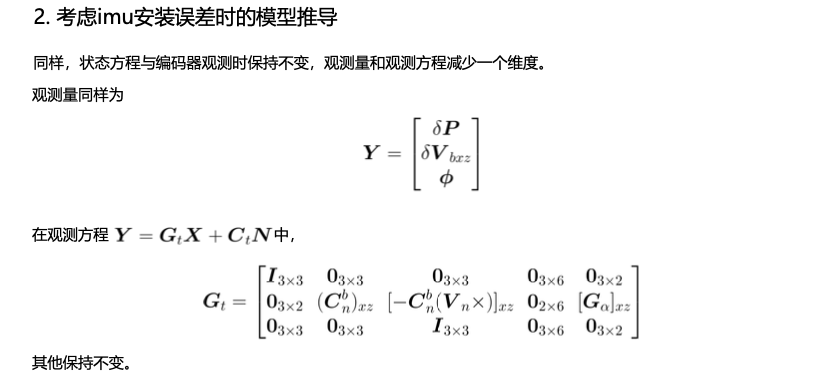
考虑imu和车体之间的旋转
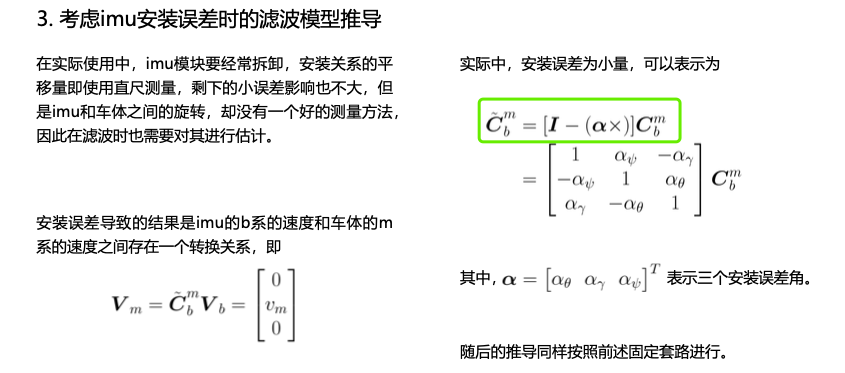
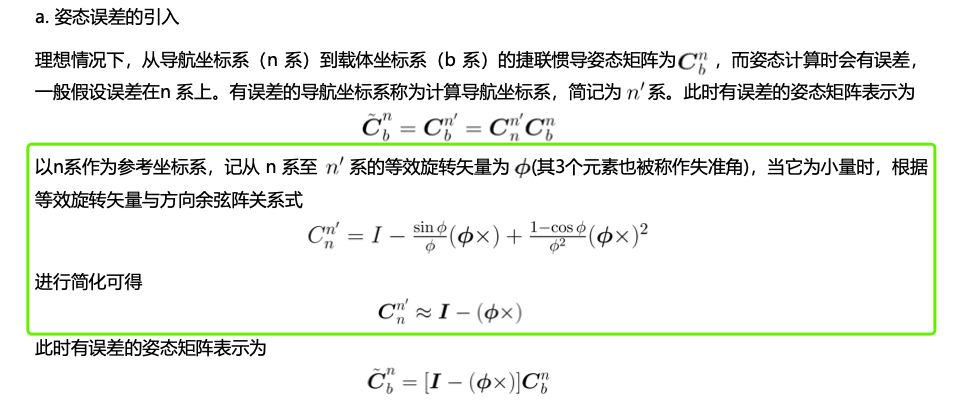
上述框框来源于:第三章-姿态误差方程的推导
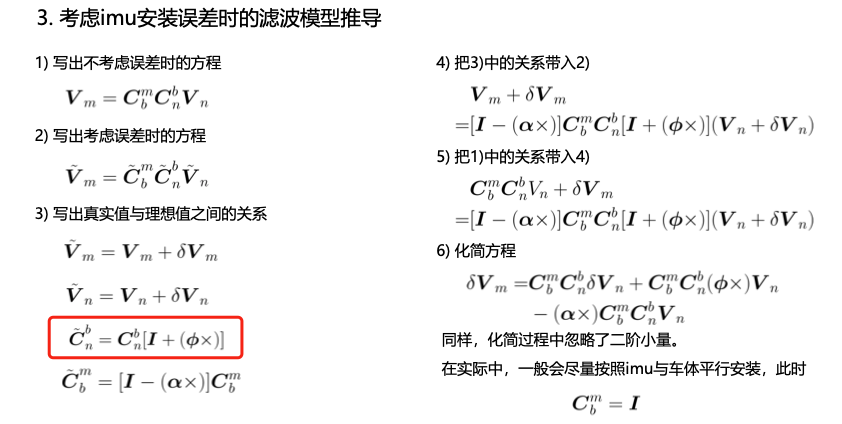
上述框框同样来源于上面的推导,只不过方向相反了而已
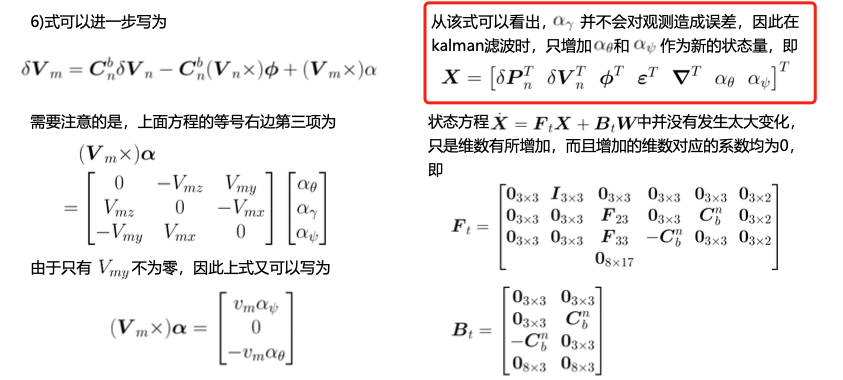
从直观来看, - 假设imu与车体有俯仰角偏差,那么,车的前向速度与imu的前向速度就会有偏差,可以反应出来 - 假设imu与车体有航向角偏差,同理 - 假设imu与车体有横滚角误差,但是车体的前向速度与imu的速度仍然一致,所以无法反映出来。
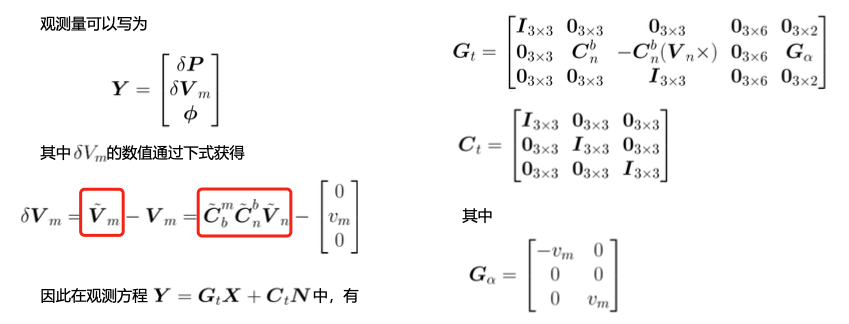
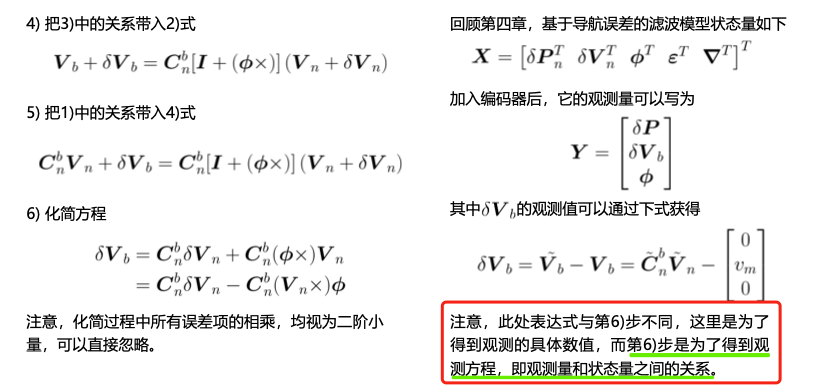
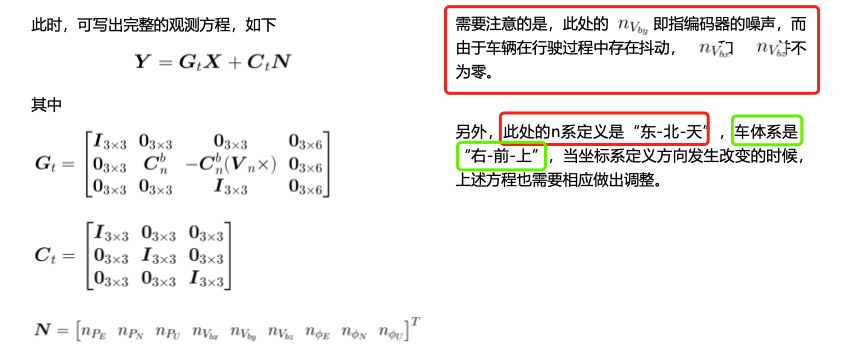
其中,
- \(\tilde{V}_m=\tilde{C}_b^m\tilde{C}_n^b\tilde{V}_n\) 表示根据当前的状态得到的投影到车体上的速度观测估计
运动约束融合
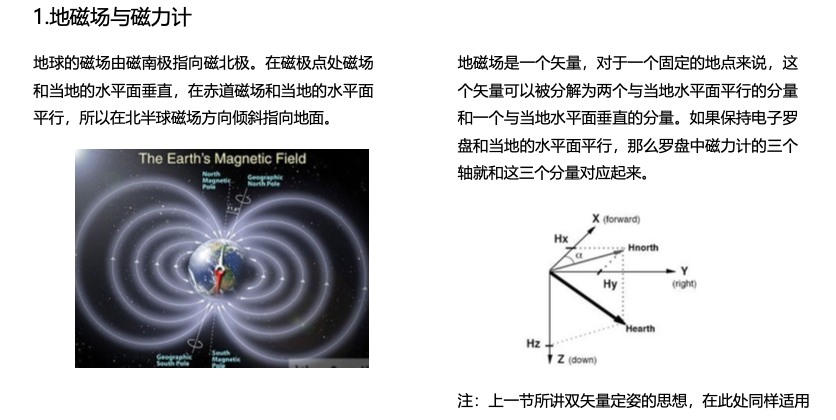
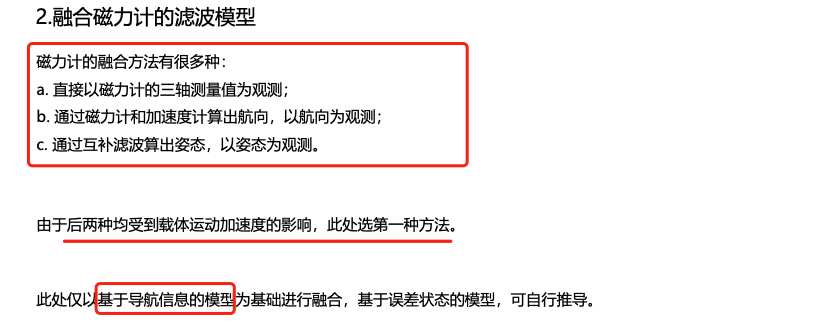
基于磁力计的融合
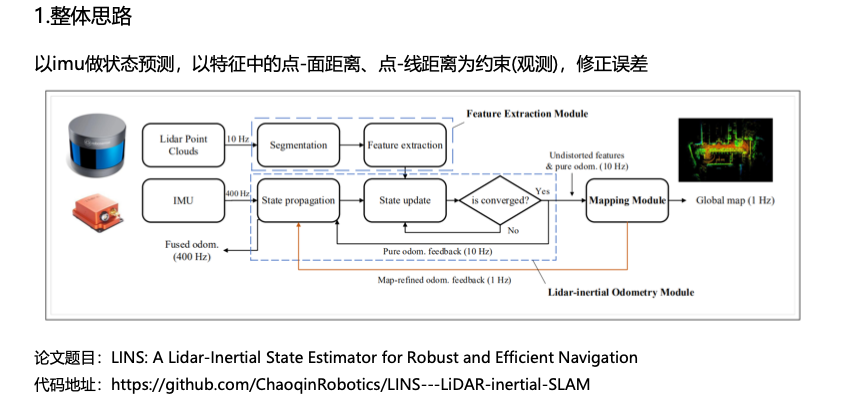
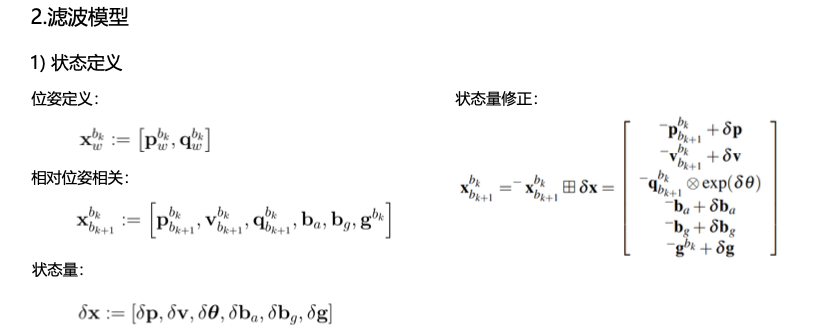
LINS融合思路
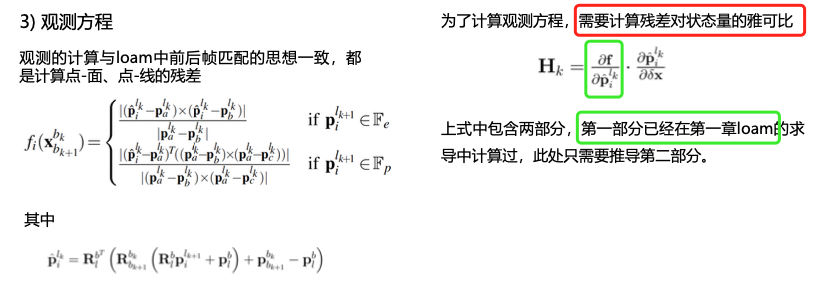
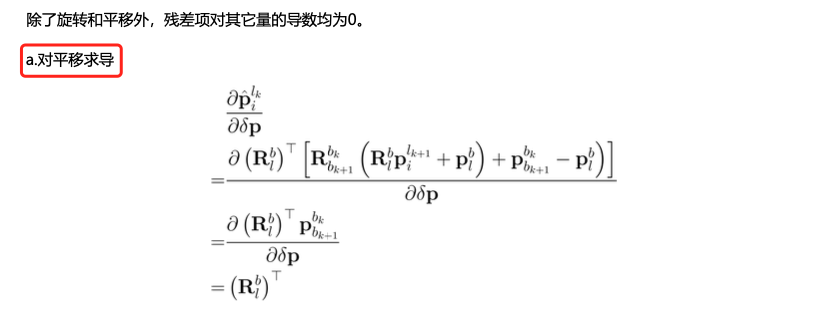
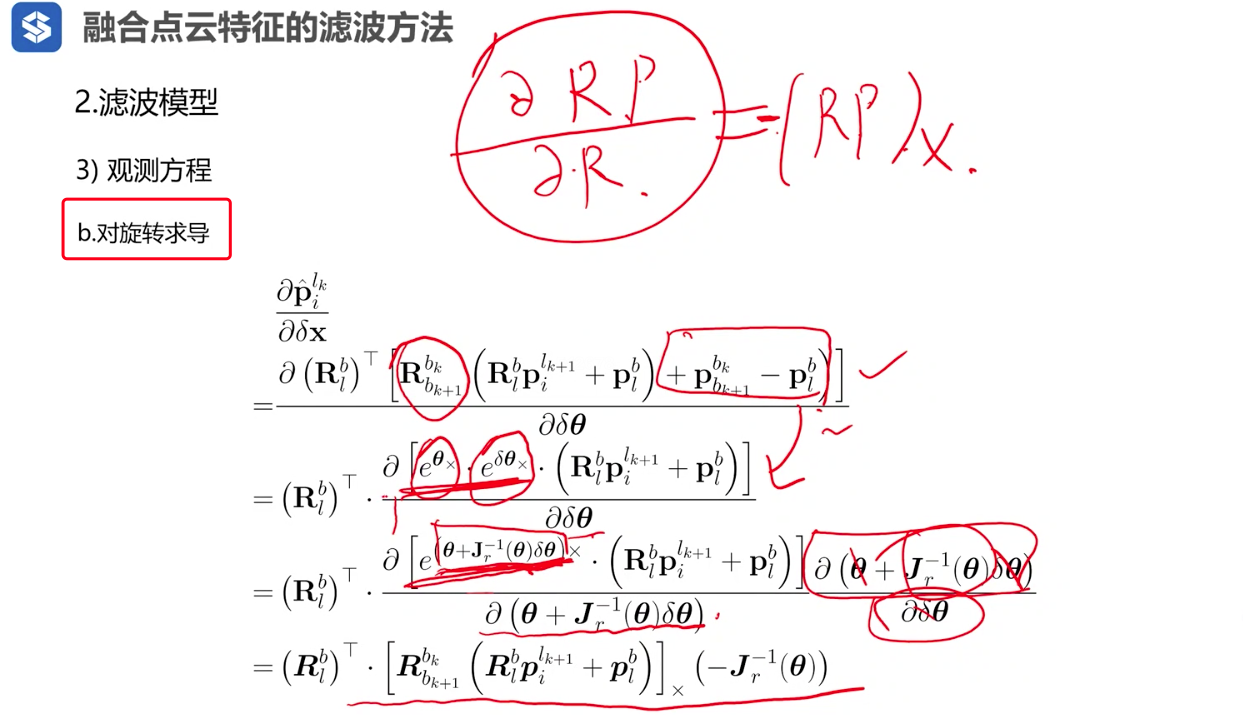
滤波器方法实现激光里程计,核心是观测怎么做,lins使用了点云的特征做紧耦合
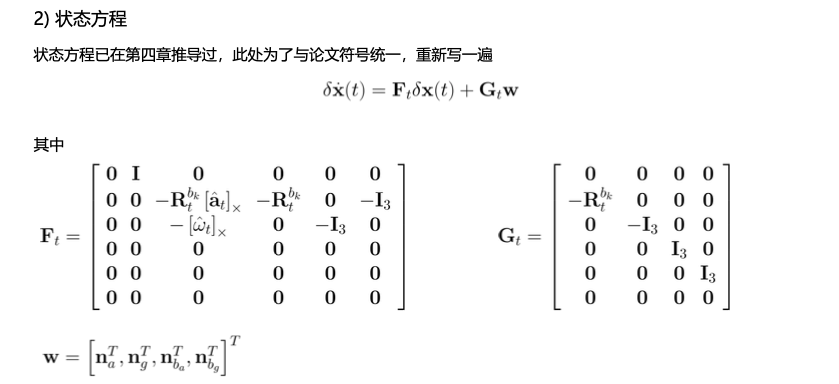
论文中的\(F_t\)矩阵可能有错