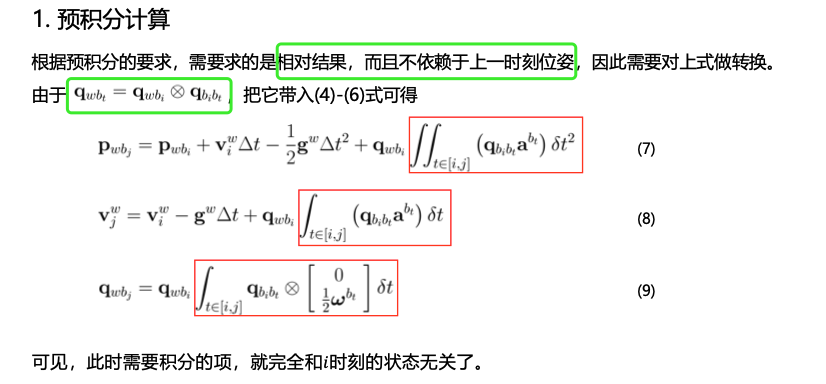
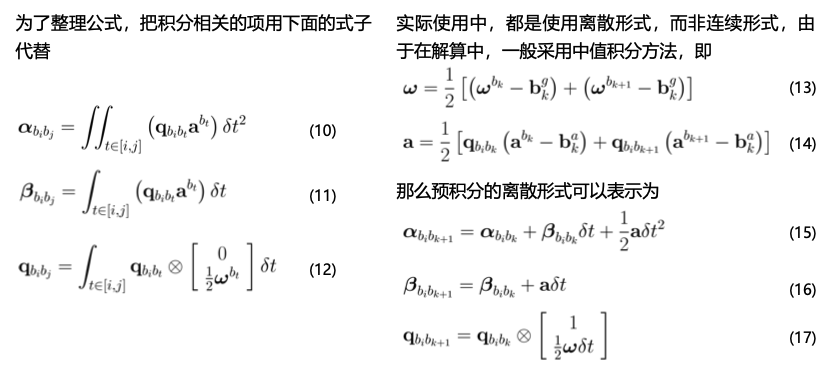
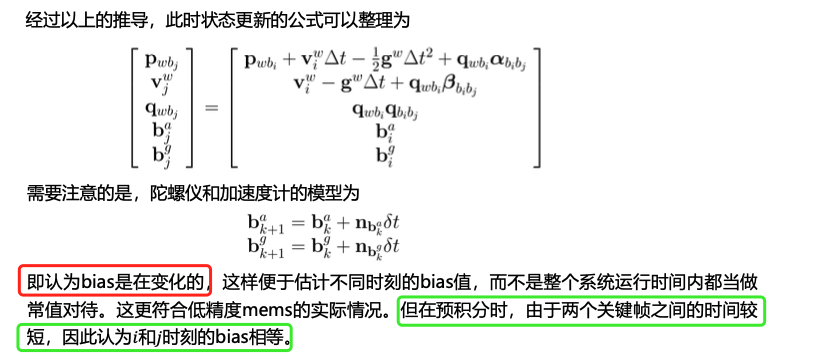
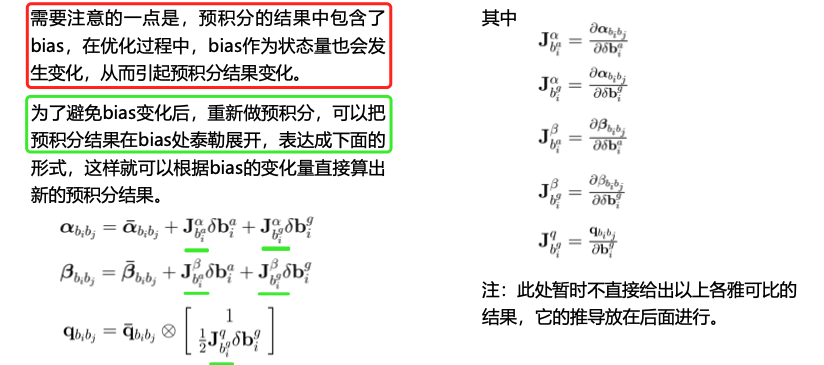
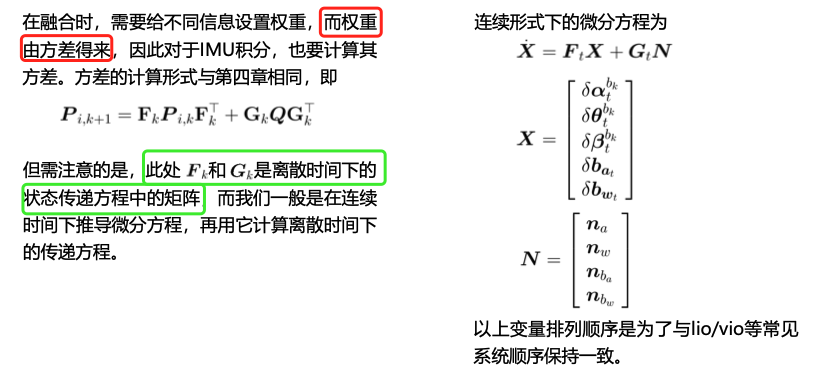
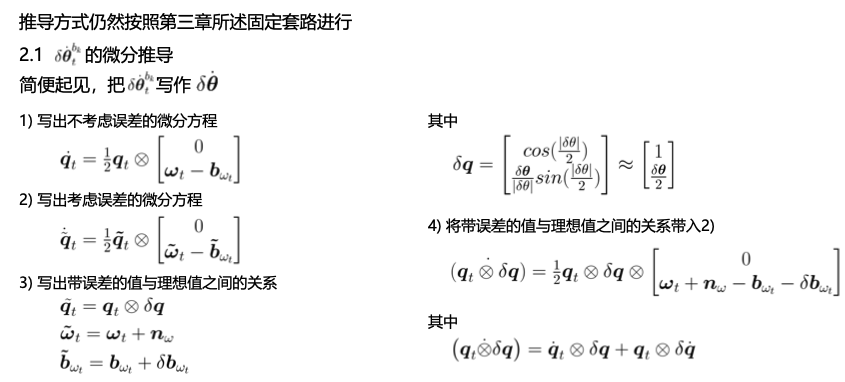
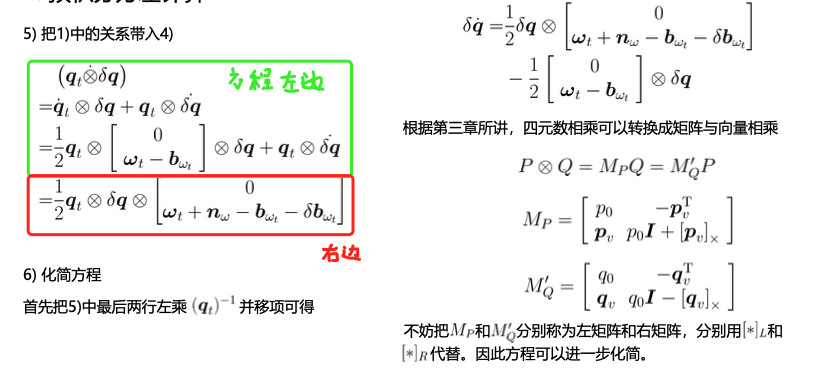
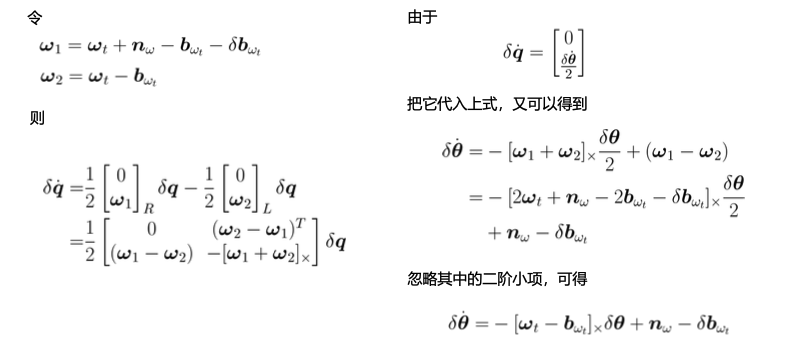
多传感器融合定位 2020-12-21 Source Edit History 第六章-(1)-基于预积分的建图方法 Catalogue 1. 基于预积分优化的建图方法2. 预积分模型推导2.1. 导航方程2.2. 连续时间的预积分计算2.3. 离散时间的预积分计算(中值积分)2.3.1. 预积分量的计算2.3.2. 预积分的更新2.3.3. 预积分的方差(传递)2.3.3.1. 姿态误差微分方程推导 基于预积分优化的建图方法 预积分模型推导 导航方程 连续时间的预积分计算 离散时间的预积分计算(中值积分) 预积分量的计算 预积分的更新 预积分的方差(传递) 姿态误差微分方程推导 这是定义在local的误差角