Catalogue
成像原理与图像特征
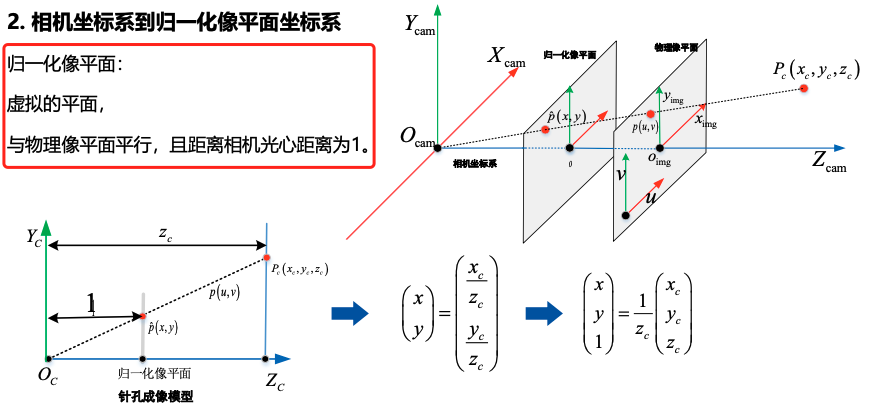
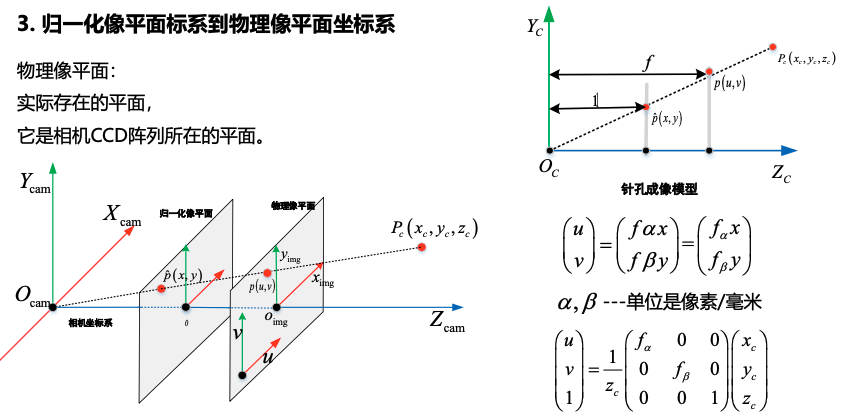
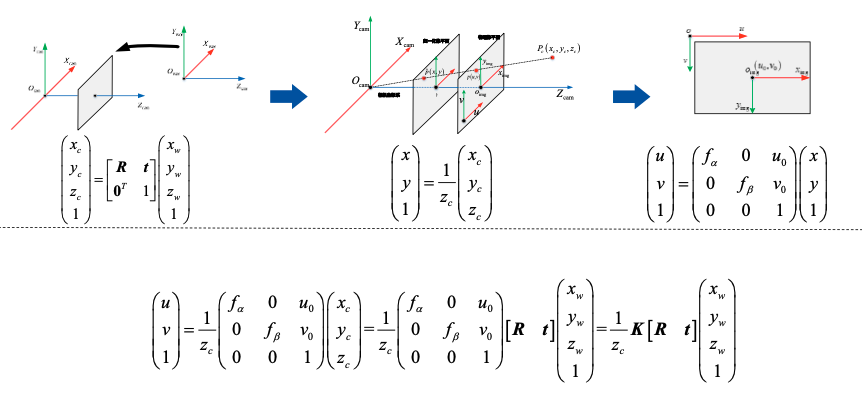
针孔相机模型
外参矩阵: 世界坐标系与相机坐标系
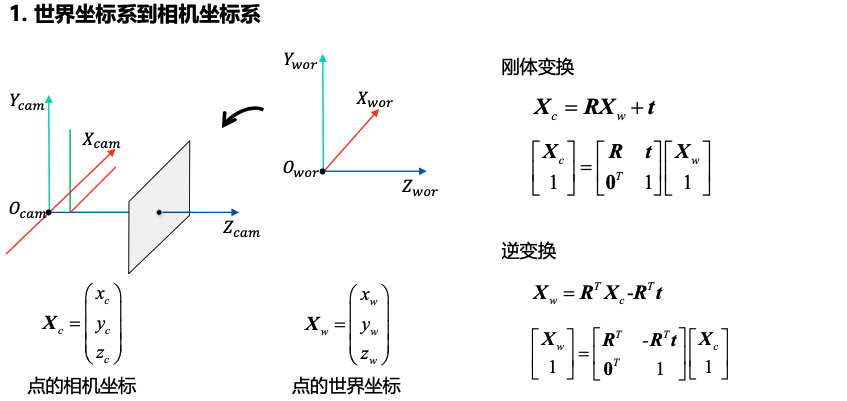
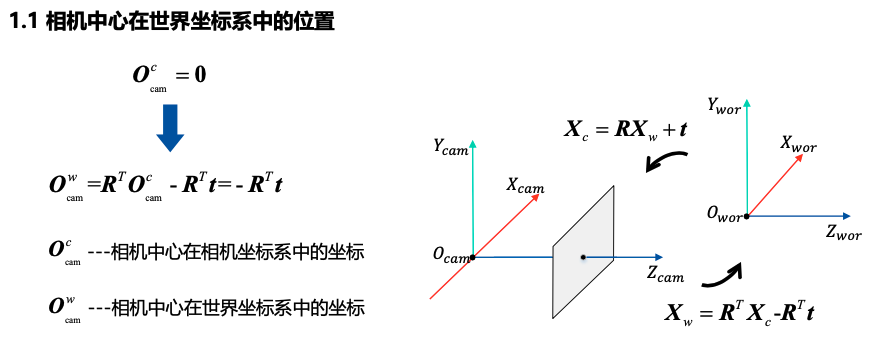

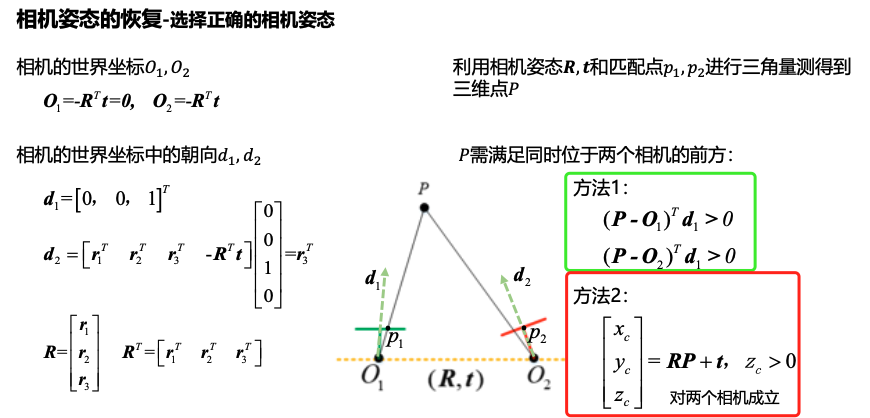
相机朝向就是外参矩阵中的旋转矩阵第三行
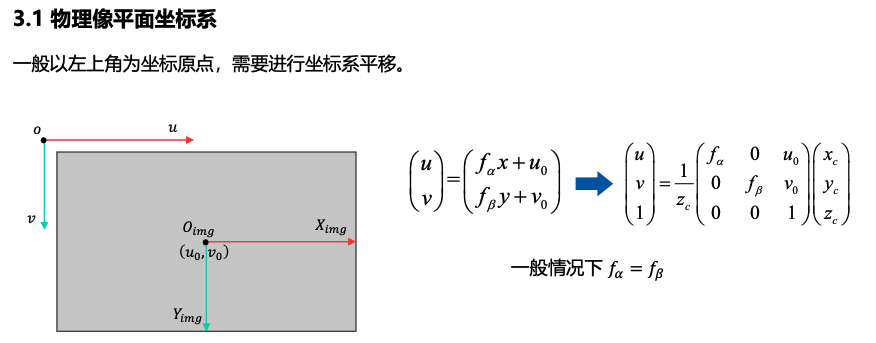
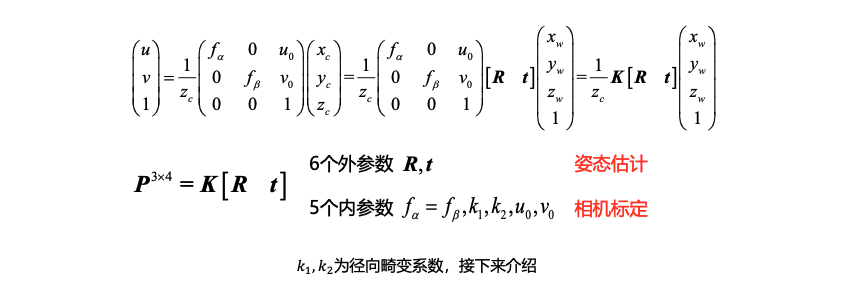
内参矩阵:
小结:
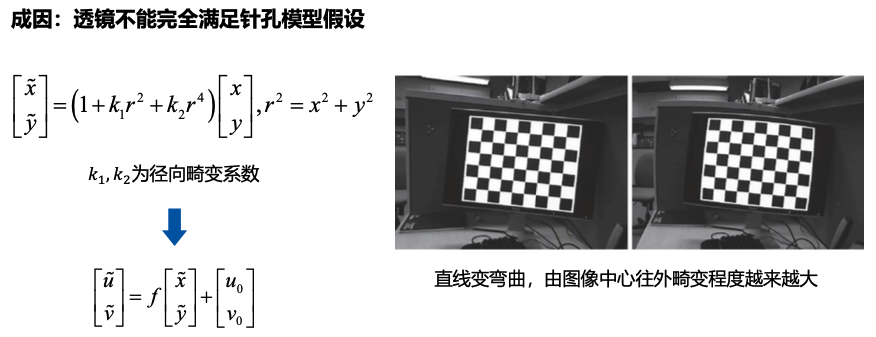
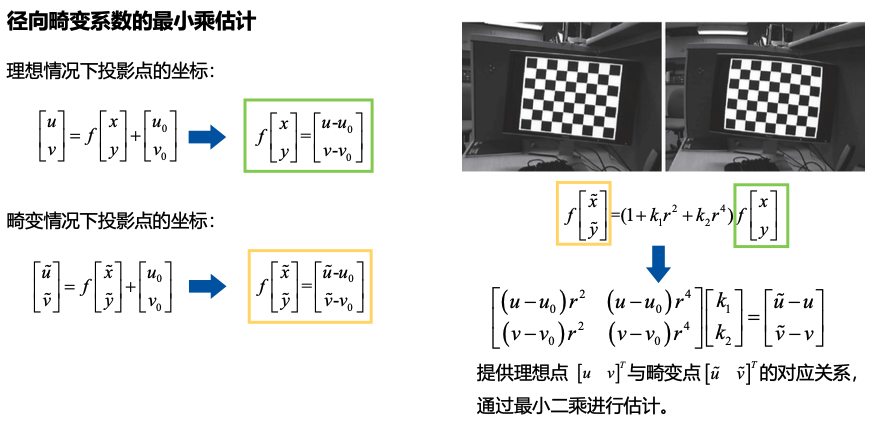
径向畸变
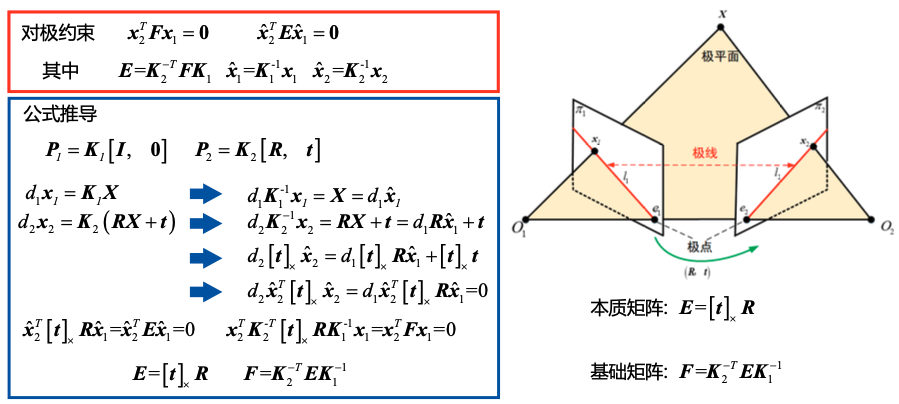
对极几何
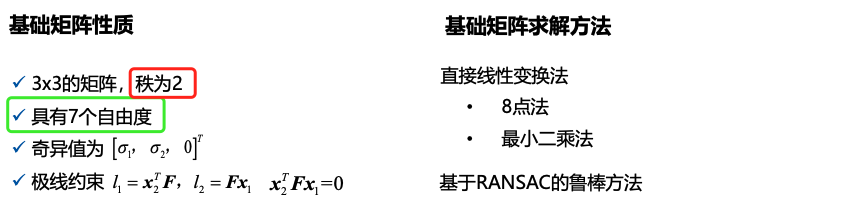
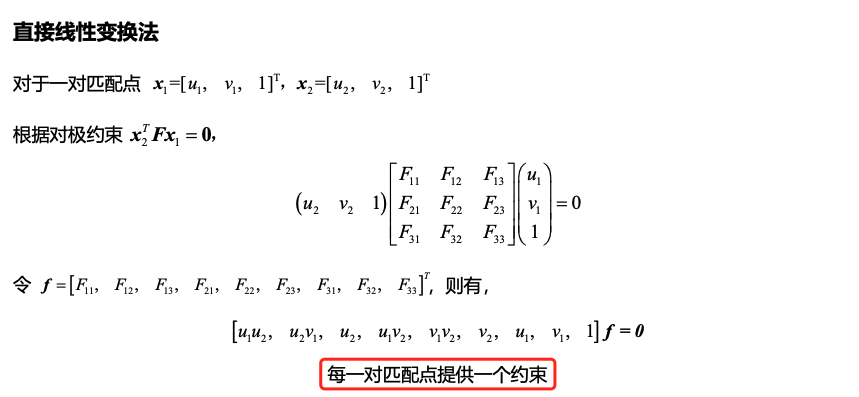
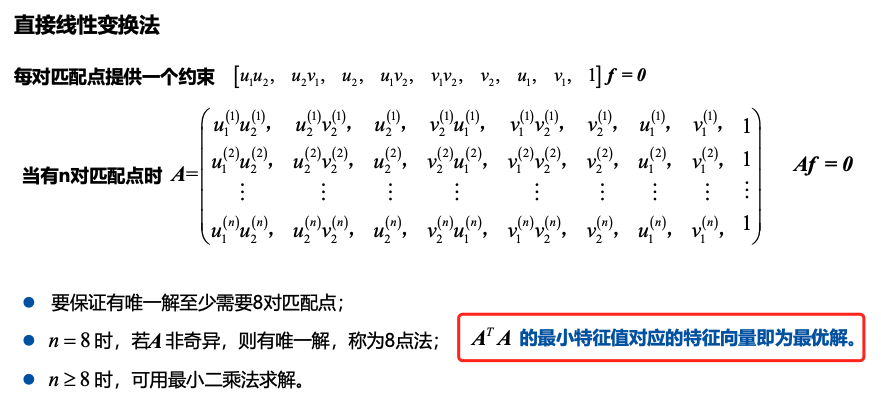
八点法求基础矩阵
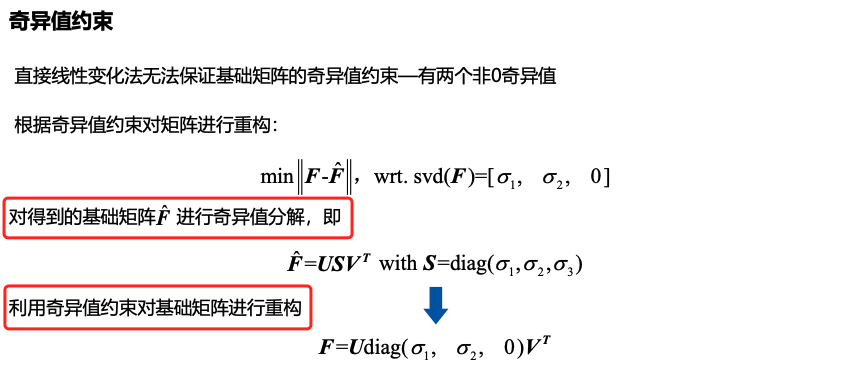
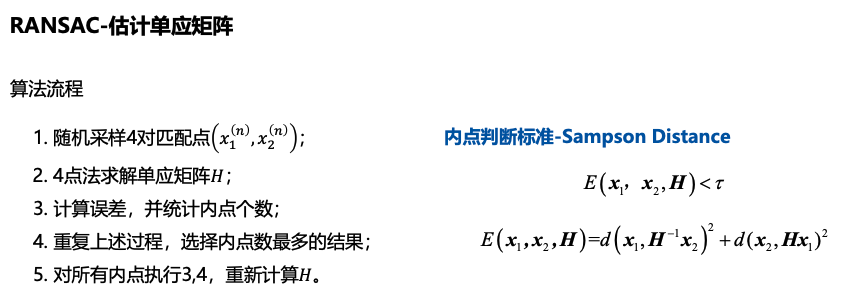
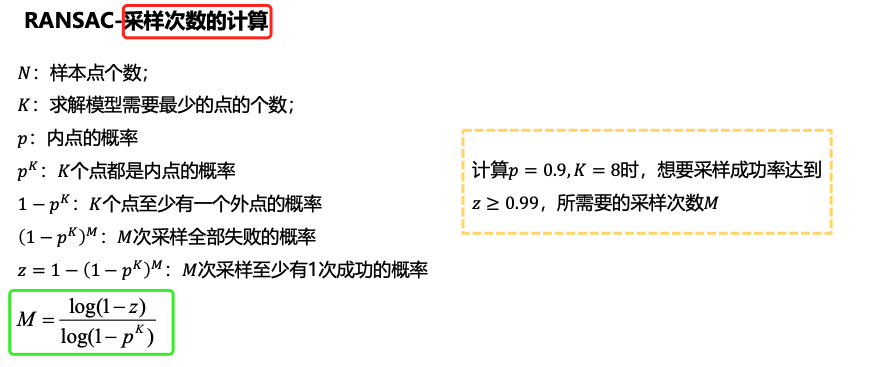
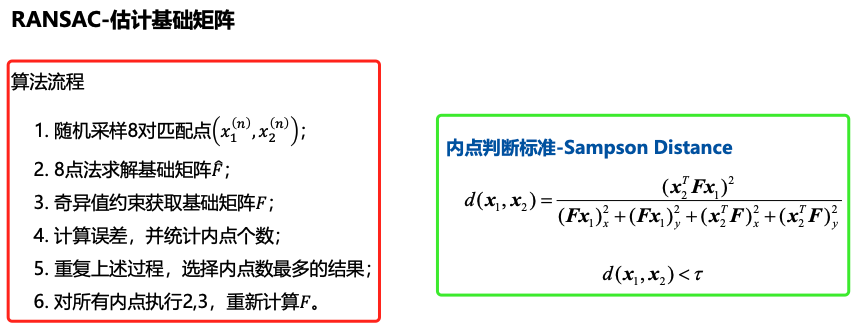
RANSAC求基础矩阵
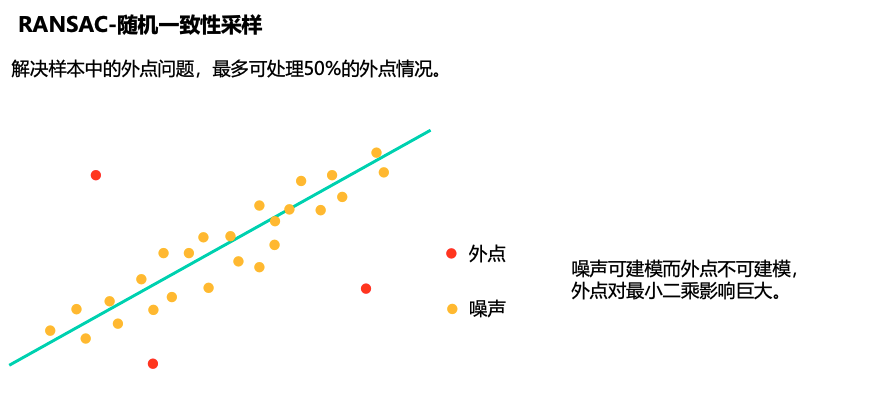
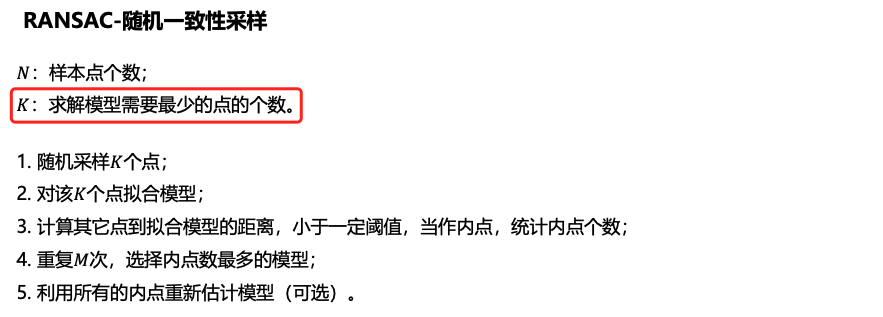
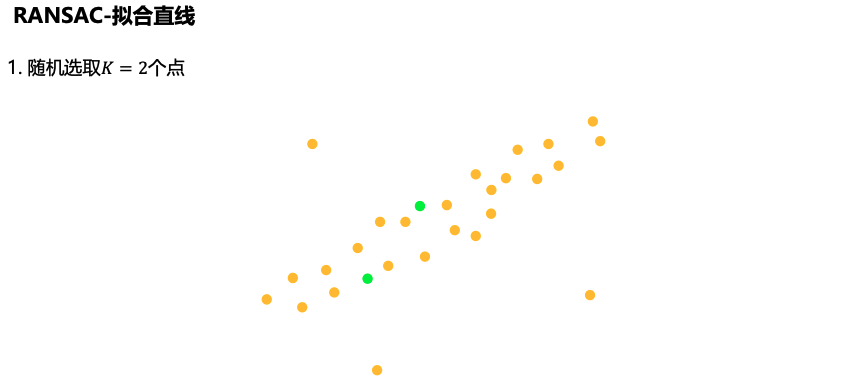
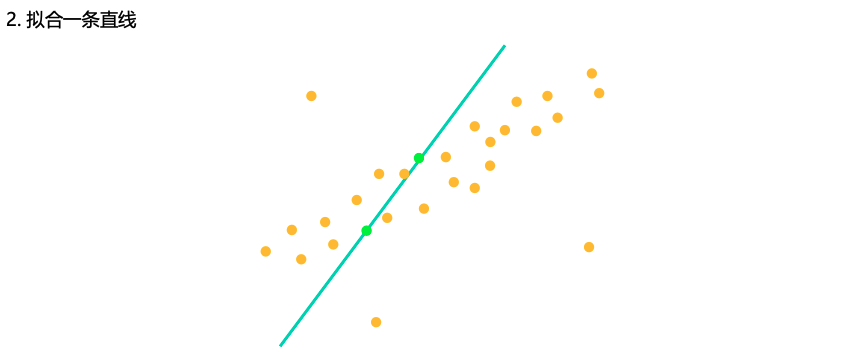
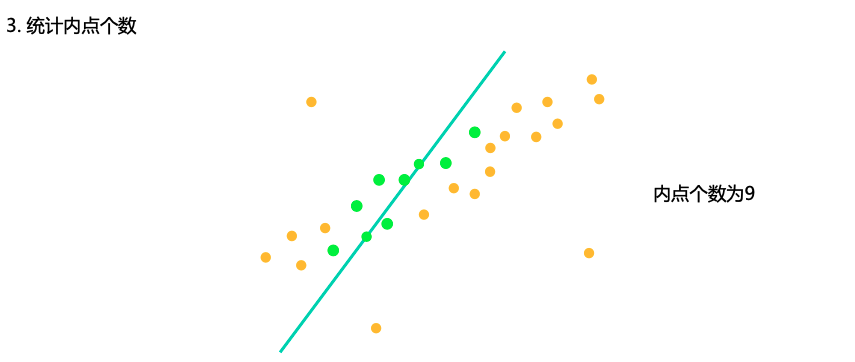
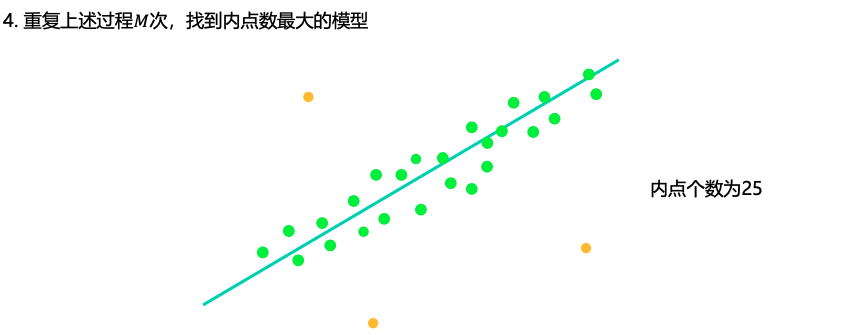
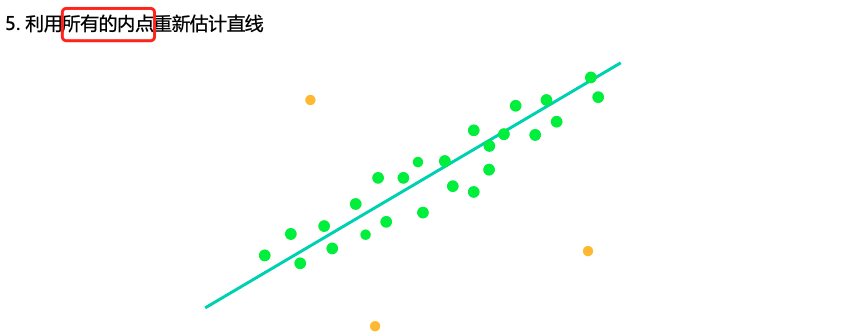
ransac拟合直线举例
ransac估计基础矩阵流程
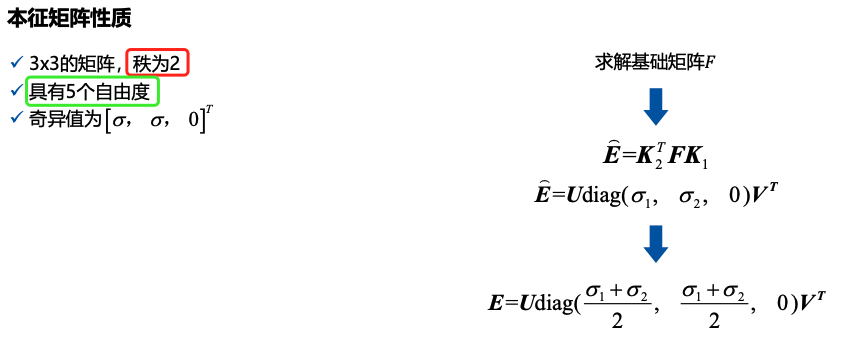
本征矩阵E
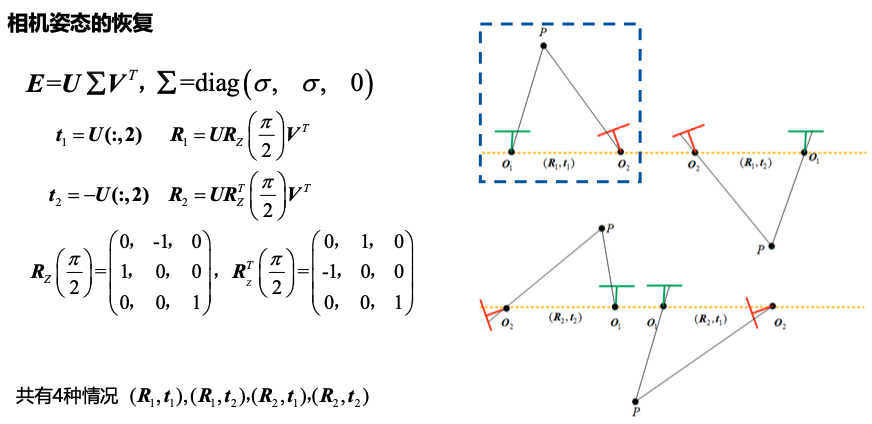
本质矩阵E恢复相机运动(四种情况)
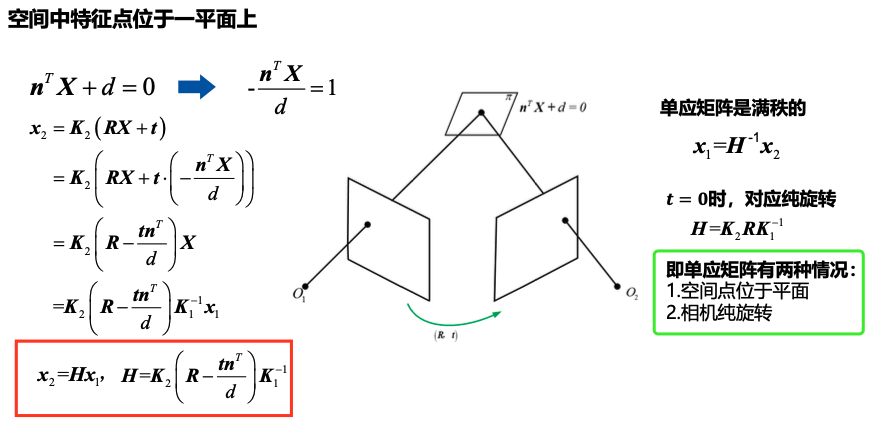
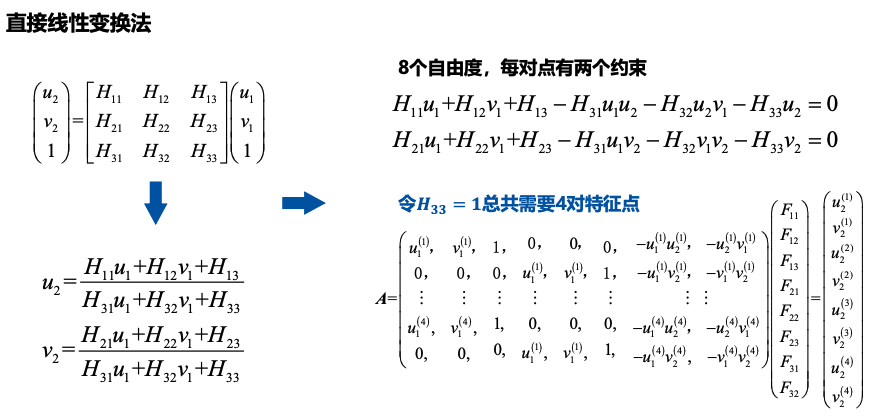
H矩阵有效的情况:
(1) 空间点都在同一平面上
(2) 相机运动只有旋转