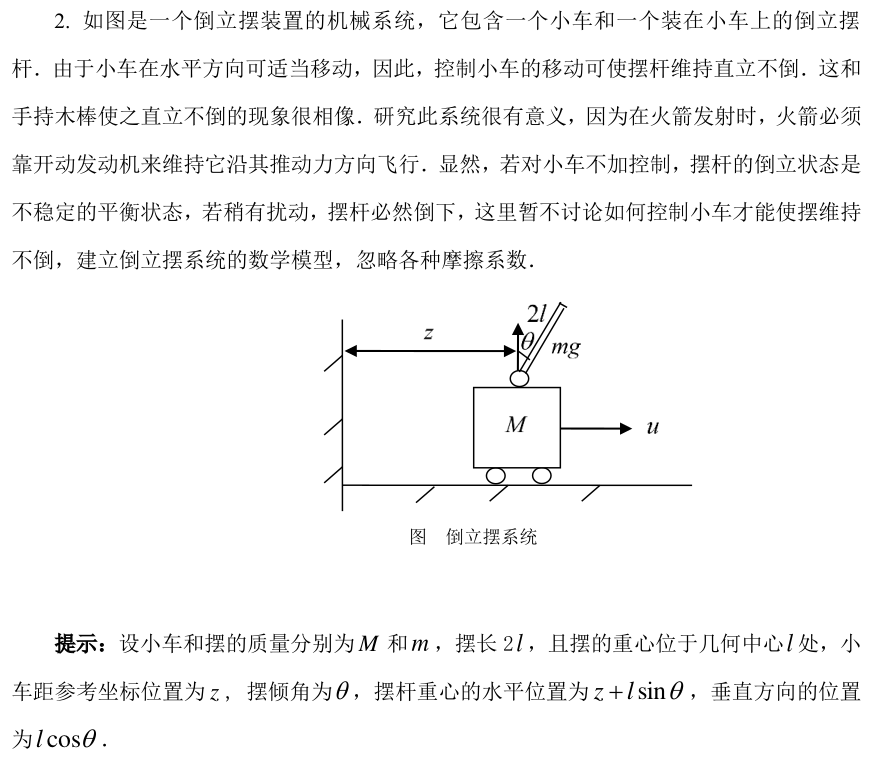
1. 倒立摆案例
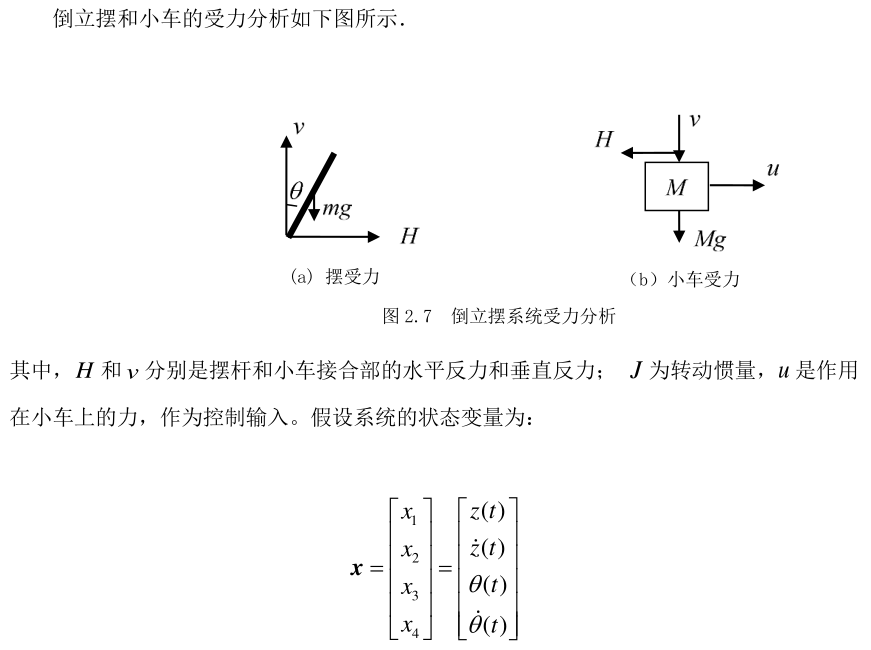
2. 法一
2.1. 已知参数
提出了一种轻量级的,地面优化的激光雷达里程计和建图方法——LeGO-LOAM,一种实时的六自由度的地面车辆位姿估计工具。
LeGO-LOAM是轻量级的,可以在低算力的嵌入式设备中达到实时的位姿估计,同时,也是地面优化的,在分割和优化步骤中,利用了地面信息的存在来加以优化。
decltype 是 C++11 新增的一个关键字,它和 auto 的功能一样,都用来在编译时期进行自动类型推导。
decltype 是“declare type”的缩写,译为“声明类型”。
既然已经有了 auto 关键字,为什么还需要 decltype 关键字呢?因为 auto 并不适用于所有的自动类型推导场景,在某些特殊情况下 auto 用起来非常不方便,甚至压根无法使用,所以 decltype 关键字也被引入到 C++11 中。
auto 和 decltype 关键字都可以自动推导出变量的类型,但它们的用法是有区别的:
在之前的 C++ 版本中,auto 关键字用来指明变量的存储类型,它和 static 关键字是相对的。auto 表示变量是自动存储的,这也是编译器的默认规则,所以写不写都一样,一般我们也不写,这使得 auto 关键字的存在变得非常鸡肋。
C++11 赋予 auto 关键字新的含义,使用它来做自动类型推导。也就是说,使用了 auto 关键字以后,编译器会在编译期间自动推导出变量的类型,这样我们就不用手动指明变量的数据类型了。
auto 关键字基本的使用语法如下:
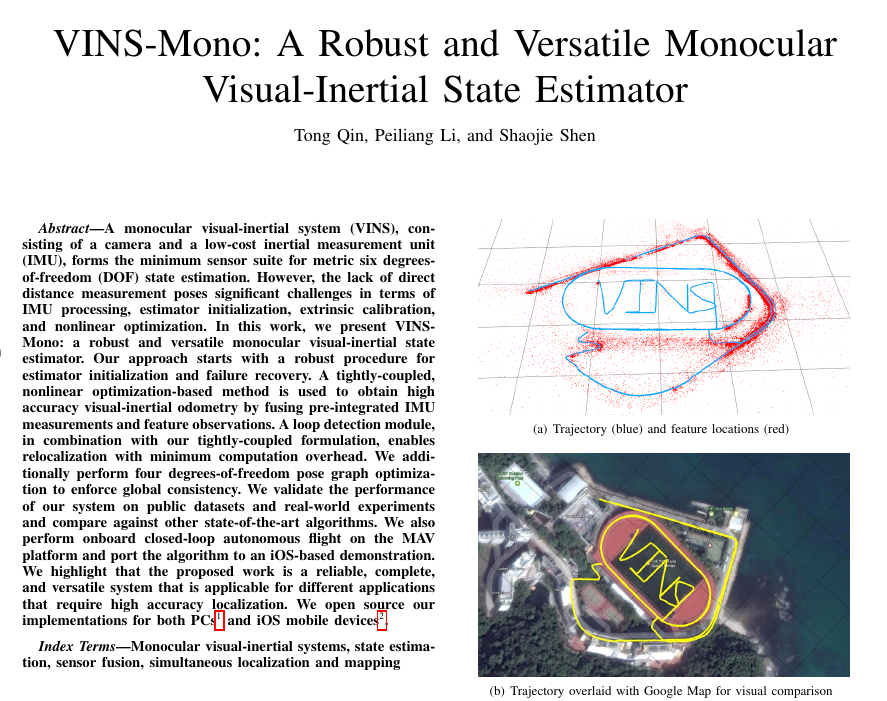
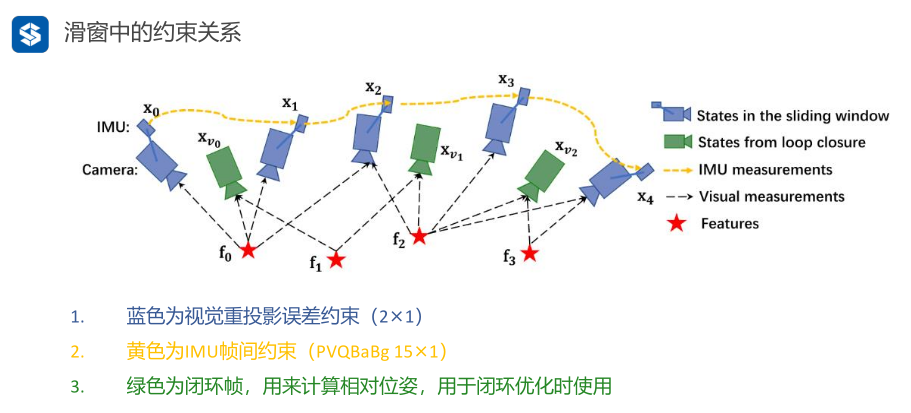
单目VI系统,由单目相机和一个低成本IMU组成,形成6自由度的状态估计器。
然而,由于单目相机缺乏直接的距离测量,在IMU处理、估计器初始化、外部校准和非线性优化方面提出了重大的挑战。
本文提出了一种一致的理论,用于描述从一系列图像中进行三维重建过程中的确定性和不确定性
首先给出关于gauges和gauge transformations的相关理论,然后讨论了如何评价具有不确定性的解的可靠性,并将克拉美罗下界推广到包含内部不确定性。
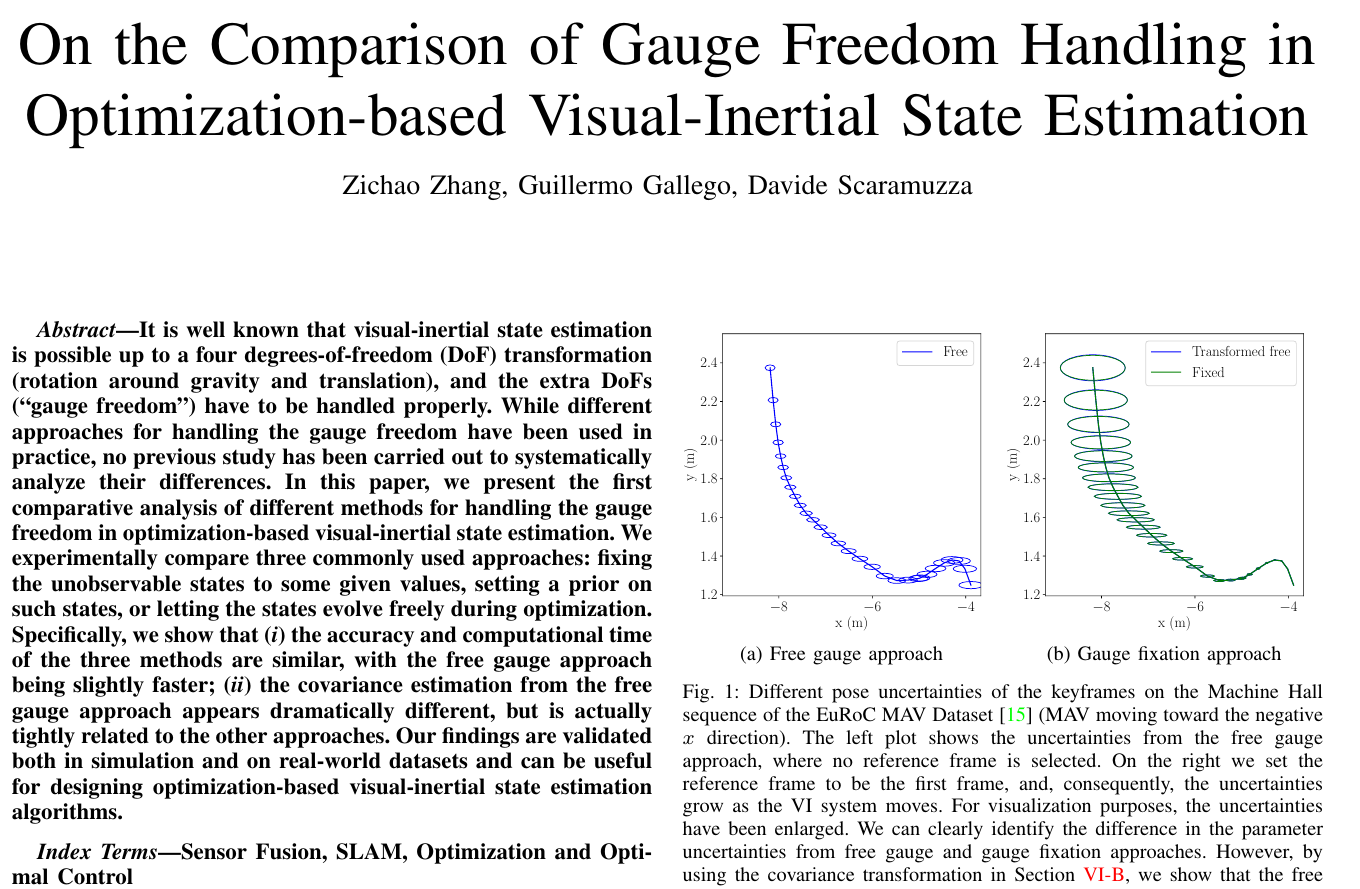
VI系统中有4个不可观测自由度,绕重力方向的旋转和平移(在本文中称为\(gauge~freedom\)),以及剩下一些可观的自由度,在求解过程中需要进行特殊的处理。 文章对比了以下3种处理方法: