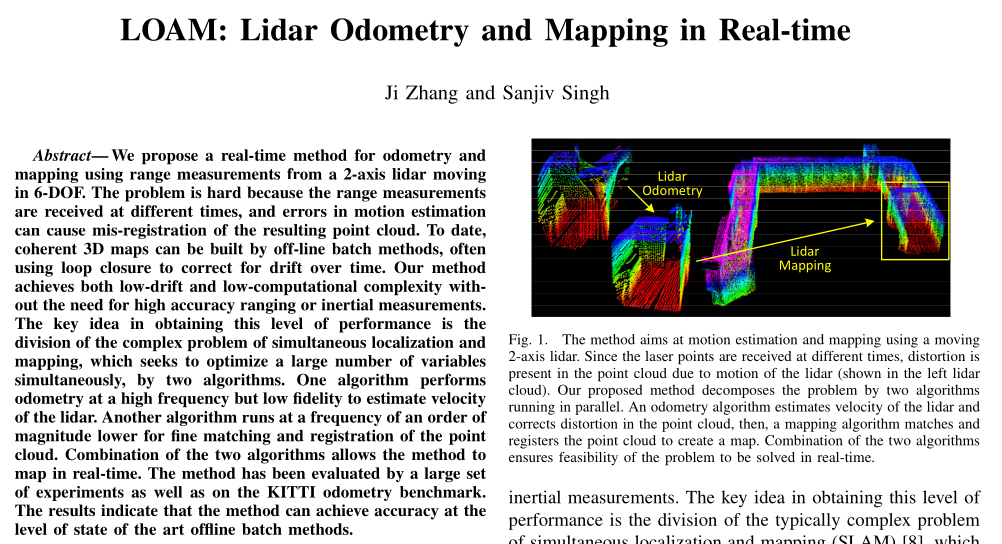
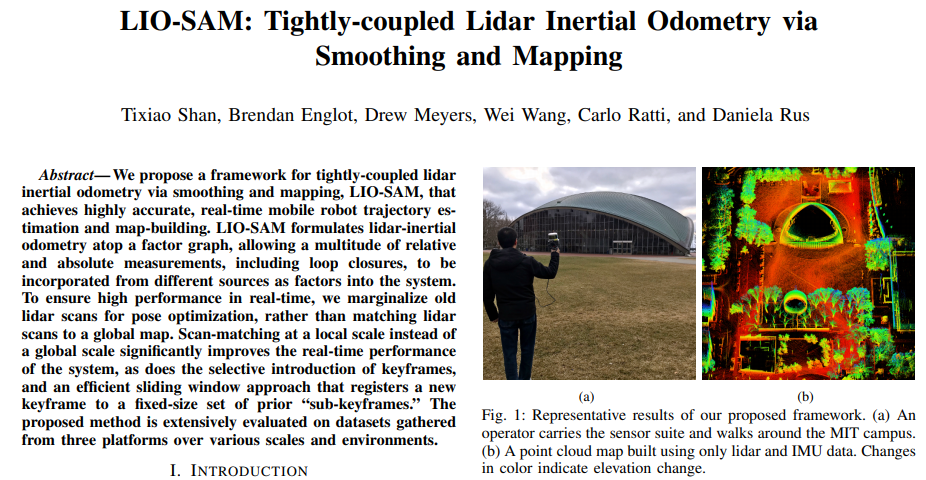
LIO-SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping
摘要
提出了基于因子图的紧耦合的Lidar-IMU系统,允许大量的相对或绝对的观测(来自不同传感器的观测如回环检测、GPS等)作为因子添加到系统中。
为了确保实时性能,对位姿优化采用边缘化旧的激光雷达扫描操作,而不是使用激光扫描来匹配全局点云地图。
提出了基于因子图的紧耦合的Lidar-IMU系统,允许大量的相对或绝对的观测(来自不同传感器的观测如回环检测、GPS等)作为因子添加到系统中。
为了确保实时性能,对位姿优化采用边缘化旧的激光雷达扫描操作,而不是使用激光扫描来匹配全局点云地图。
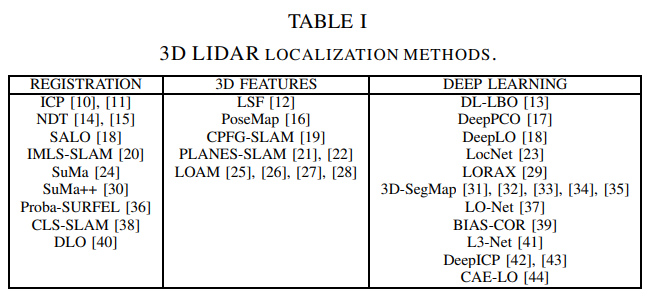
本次调查的目的是回顾和介绍与三维激光雷达定位相关的工作,比较文献中报道的不同结果,并讨论各自的优缺点。
通常与离线构建的地图结合使用,这些方法的优越性在于使用点云配准的方法。虽然这些方法非常精确,但当只依赖于激光雷达数据时,它们的速度太慢,无法实现实时处理。

提供了数据集地址: http://irap.kaist.ac.kr/dataset.
这里使用的是Apollo D-Kit套件,采用的是星网宇达公司的M2组合导航。第一步先对组合导航进行设置,第二步是修改ROS社区开源Package nmea_navsat_driver驱动
1 | $cmd,through,usb0,null*ff |
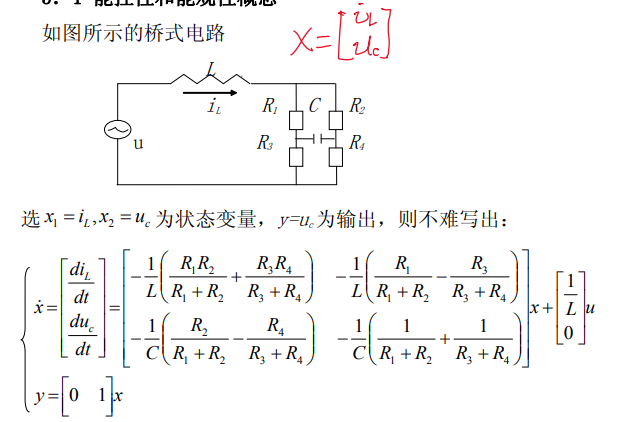
能控性和能观测性是现代控制理论中两个很重要的基础性概念,最优控制和最佳估计都是以它们的存在为条件的,是由 Kalmen(卡尔曼)1960年首先提出的。
可控性和可观测性就是回答“系统的状态是否能控制“和”状态的变化能否由输出测量出来这两个问题。