Design is important for readability and maintainability. It is highly recommended to follow the design rules for distributing your idea. The outline is based on the overview.
设计对于可读性和可维护性非常重要。强烈建议遵循设计规则来实现你的想法。
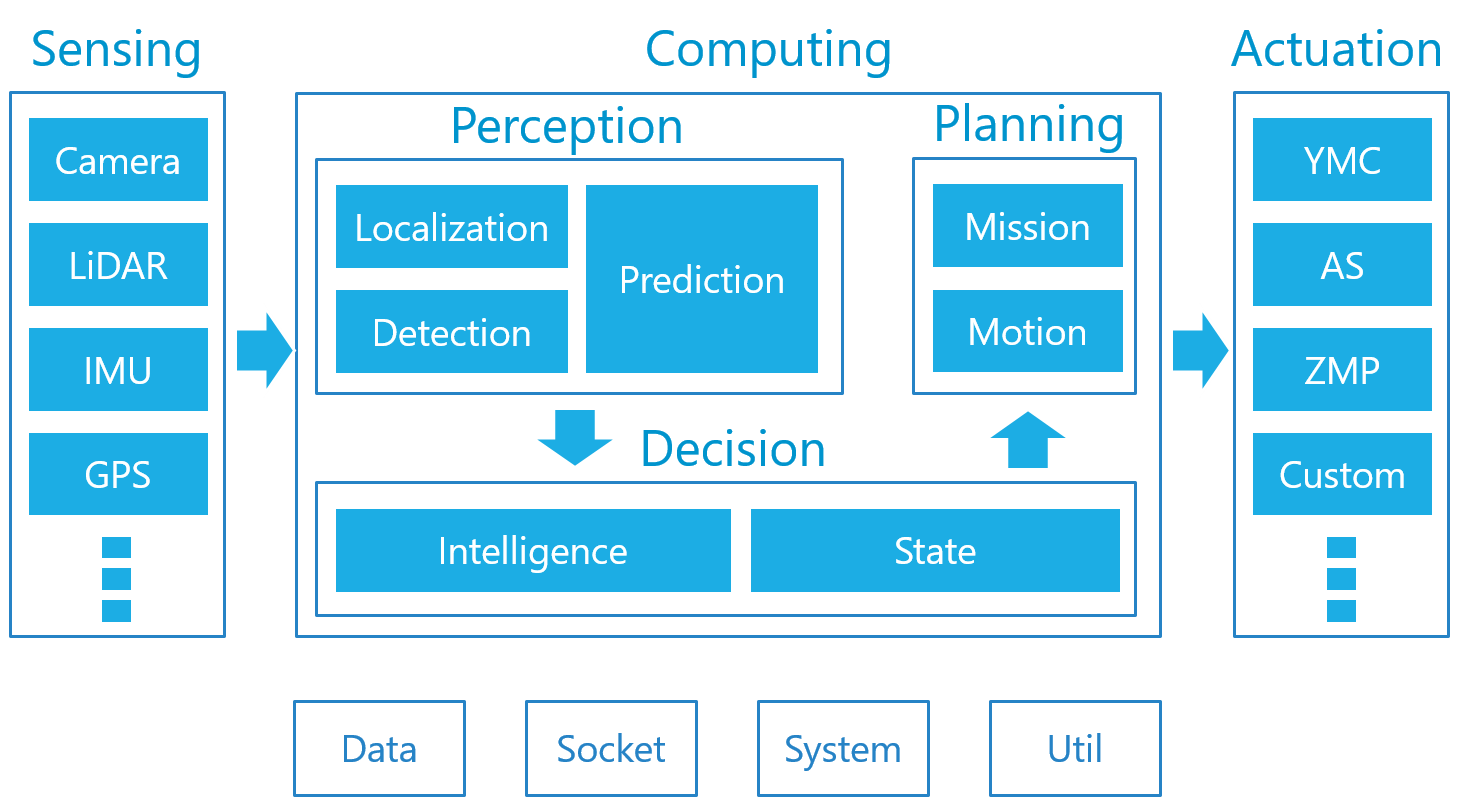
Namespace
消息类型
autoware_(namespace)_msgs::typename