1. Real-Time Loop Closure in 2D LIDAR SLAM
2. 摘要
提出的方法应用在一个小型背包平台,可以达到实时的建图和定位,回环精度为5CM。为了达到实时的回环检测,使用了分枝定界为帧扫描和子图的匹配运算进行加速,这个方法达到了state-of-art。
3. 介绍
提出的方法应用在一个小型背包平台,可以达到实时的建图和定位,回环精度为5CM。为了达到实时的回环检测,使用了分枝定界为帧扫描和子图的匹配运算进行加速,这个方法达到了state-of-art。
阅读Cartographer代码,需要解决一些函数的跳转关系,但是这个项目有点庞大,Qt-creator-ros也不能直接对整个克隆下来的项目进行分析其中的依赖关系,导致很多函数跳转不能实现。
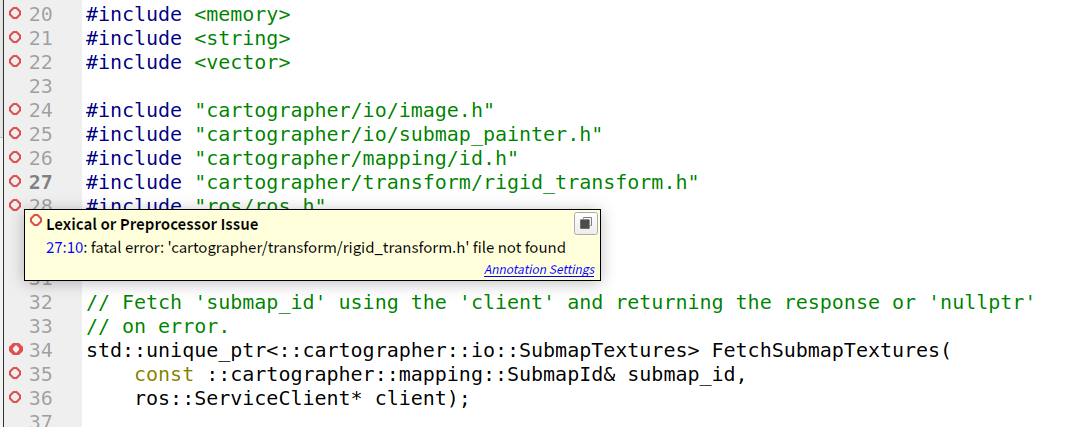
本文通过修改CMakeList.txt 以及 一些文件位置, 使得Qt-Creator可以解决跳转的问题,可以自由在代码海洋中穿梭。对于阅读Cartographer有更好的效果。
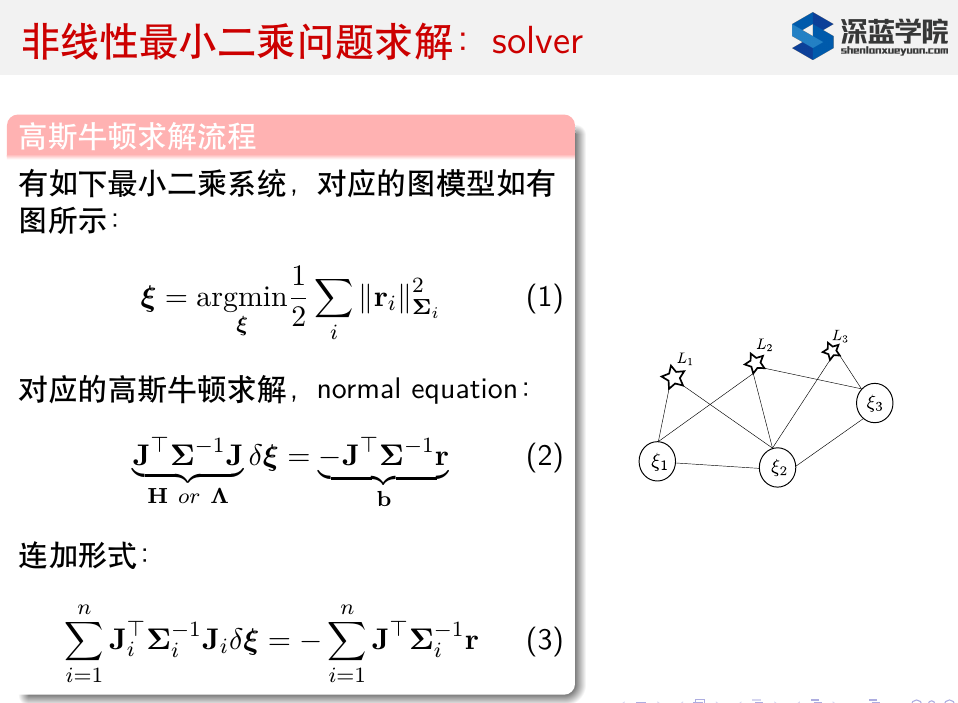
第三讲(上): (1)最小二乘问题的求解推导 (2)其中有LM算法的相关推导以及鲁棒核函数的推导
_%E5%9F%BA%E4%BA%8E%E4%BC%98%E5%8C%96%E7%9A%84IMU%E4%B8%8E%E8%A7%86%E8%A7%89%E4%BF%A1%E6%81%AF%E8%9E%8D%E5%90%88/imgs/2020-02-08-19-52-55.png)
_VIO%E6%AE%8B%E5%B7%AE%E5%87%BD%E6%95%B0%E7%9A%84%E6%9E%84%E5%BB%BA/imgs/2020-02-09-10-33-57.png)
_VIO%E6%AE%8B%E5%B7%AE%E5%87%BD%E6%95%B0%E7%9A%84%E6%9E%84%E5%BB%BA/imgs/2020-02-09-10-35-07.png)
\(x_i\)是15维的状态量,因为姿态\(q_{wbi}\)是指更新量\(\delta\)
文章对激光SLAM,视觉SLAM以及它们的融合进行回顾。对于激光或者视觉slam而言,文章阐述了传感器的基本类型和产品、开源系统的种类和历史,深度学习的嵌入,挑战以及未来。另外的,视觉惯性里程计VIO也有被提及。对于激光和视觉融合的SLAM,本文重点提到了关于多传感器的标定,硬件、数据、任务层级的融合。最后,文章讲述了一些开放的问题以及前言的思考。文章的贡献可总结如下: