VIO第六讲 2020-02-14 Source Edit History 第六讲_三角化 三角化 当估计出相机运动之后, 需要利用相机运动估计出特征点的空间位置,三角测量(三角化)就是用来解决这个问题的。三角化主要是单目mono使用 Read More
VIO第四讲 2020-02-14 Source Edit History 第四讲(上)_基于滑动窗口算法的VIO系统原理 1. 第四讲(上)_基于滑动窗口算法的VIO系统原理 1.1. 高斯分布到信息矩阵 1.1.1. SLAM问题的模型 Read More
VIO第四讲 2020-02-14 Source Edit History 第四讲(下)_基于滑动窗口算法的VIO系统 1. 第四讲(下)_基于滑动窗口算法的VIO系统 1.1. 滑动窗口算法 1.1.1. 图的表示 Read More
VIO第四讲 2020-02-14 Source Edit History 第四讲(拓展)_高斯过程(边缘化与条件作用) 1. 高斯过程(边缘化与条件作用) 1.1. 高斯过程的直观解释 1.1.1. 多元高斯分布 高斯分布(也叫做正态分布)是高斯过程的基础构件。而我们最感兴趣的是多元高斯分布,其每个随机变量都呈正态分布,联合分布也是高斯的。一般来说,多元高斯分布由均值向量\(\mu\)和协方差矩阵\(\sum\)定义。 Read More
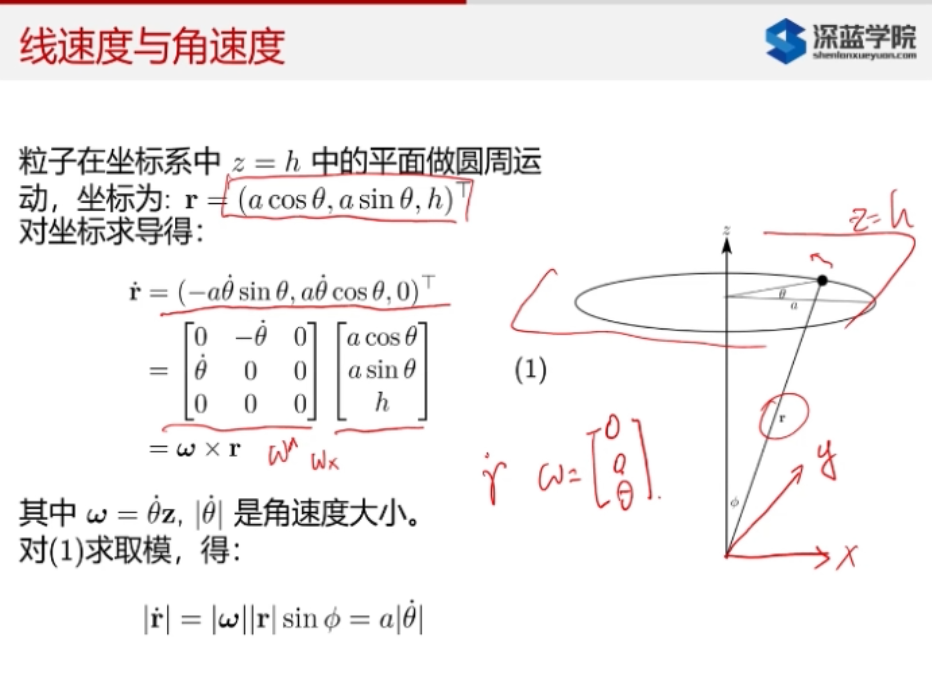
VIO第一讲 2020-02-14 Source Edit History 第一讲_预备知识 1. 第一讲_预备知识 Read More VIO第二讲 2020-02-13 Source Edit History 第二讲_IMU相关内容 1. 第二讲_IMU相关内容 1.1. 旋转运动学 1.1.1. 运动半径\(r\)对\(\theta\)的求导,再写成矩阵形式 \(\color{red}{下图中:半径a和高度h固定}\) Read More « Prev1…151617
VIO第二讲 2020-02-13 Source Edit History 第二讲_IMU相关内容 1. 第二讲_IMU相关内容 1.1. 旋转运动学 1.1.1. 运动半径\(r\)对\(\theta\)的求导,再写成矩阵形式 \(\color{red}{下图中:半径a和高度h固定}\) Read More
_%E9%AB%98%E6%96%AF%E8%BF%87%E7%A8%8B(%E8%BE%B9%E7%BC%98%E5%8C%96%E4%B8%8E%E6%9D%A1%E4%BB%B6%E4%BD%9C%E7%94%A8)/imgs/2020-02-13-09-08-44.png)
_%E5%9F%BA%E4%BA%8E%E6%BB%91%E5%8A%A8%E7%AA%97%E5%8F%A3%E7%AE%97%E6%B3%95%E7%9A%84VIO/imgs/2020-02-10-22-04-14.png)
_%E5%9F%BA%E4%BA%8E%E6%BB%91%E5%8A%A8%E7%AA%97%E5%8F%A3%E7%AE%97%E6%B3%95%E7%9A%84VIO/imgs/2020-02-10-22-03-54.png)
_%E5%9F%BA%E4%BA%8E%E6%BB%91%E5%8A%A8%E7%AA%97%E5%8F%A3%E7%AE%97%E6%B3%95%E7%9A%84VIO/imgs/2020-02-11-14-47-33.png)
_%E5%9F%BA%E4%BA%8E%E6%BB%91%E5%8A%A8%E7%AA%97%E5%8F%A3%E7%AE%97%E6%B3%95%E7%9A%84VIO/imgs/2020-02-11-14-49-33.png)