Localization for Ground Robots: On Manifold Representation, Integration, Re-Parameterization, and Optimization
摘要
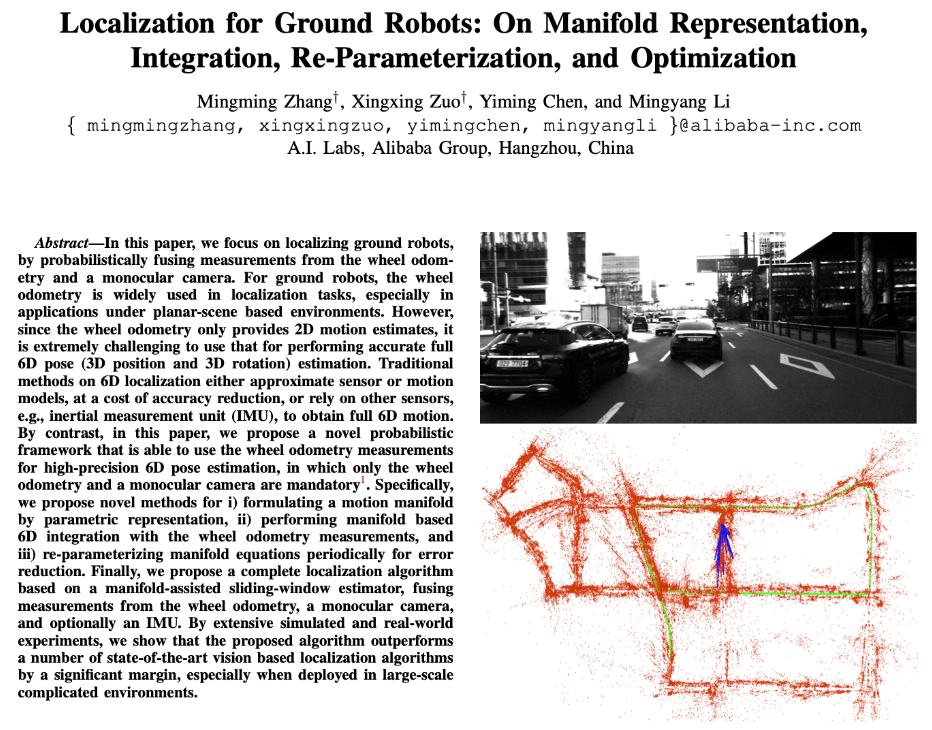
本文专注于通过概率融合里程计和单目相机进行地面机器人定位的任务。具体而言,(1) 提出了一种新的方法,通过参数重表示的方法形成motion manifold (2) 使用轮式里程计进行6D的整合 (3) 重新参数化流形等式,减少误差。最后,提出一种基于流形辅助的滑动窗口估计器的完整定位算法,其中使用轮式里程计、单目相机以及可选的IMU。
符号标记和传感器模型