占用栅格更新过程
静态二值贝叶斯滤波
机器人技术中的某些问题表达为不随时间变化的二值状态的最优估计间题。这些问题通过二值贝叶斯滤波 (binary Bayes filter) 来阐述。
如果一个机器人从传感器测量的序列中估计环境的一个固定的二值数,此时这类问题就产生了。例如,一个机器人可能想知道门是开着的还是关着的,并认为在检测期间门的状态不改变。
更新算法
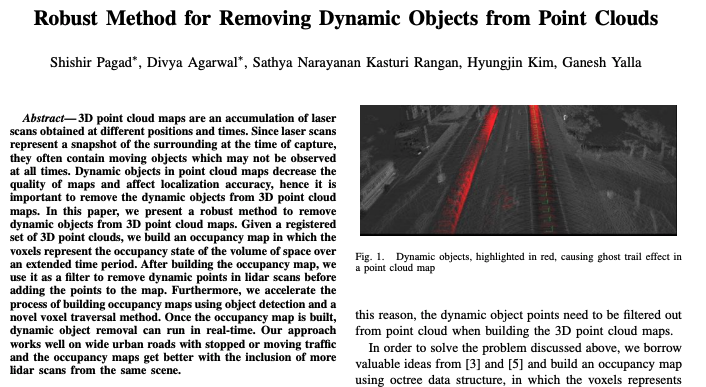
提出了一种从3D点云地图中删除动态对象的可靠方法。给定一组已配准的3D点云,我们构建一个占据栅格地图,其中体素表示扩展时间段内空间量的占用状态。构建占用地图后,我们将其用作过滤器,以在将激光雷达扫描中的动态点添加到地图之前将其删除。此外,我们使用对象检测和新颖的体素遍历方法来加速构建占用地图的过程。一旦构建了占用图,就可以实时运行动态对象移除。我们的方法在交通停滞或移动的宽阔城市道路上效果很好,并且由于包含了来自同一场景的更多激光雷达扫描,因此占用地图变得更好。

提出一种3D SLAM方法,采用一种使用正态分布集群来局部近似几何体的icp算法,与基于正太分布的icp,GICP等方法相比,提出的icp方法通过使用\(Frobenius\)范数以及正规化的协方差矩阵简单地稳定了cost func的规范形式。
过去的方法使用pca来进行stabilize,其计算成本高于提出的方法,并且,提出的slam方法可以减少错误的闭环带来的影响.
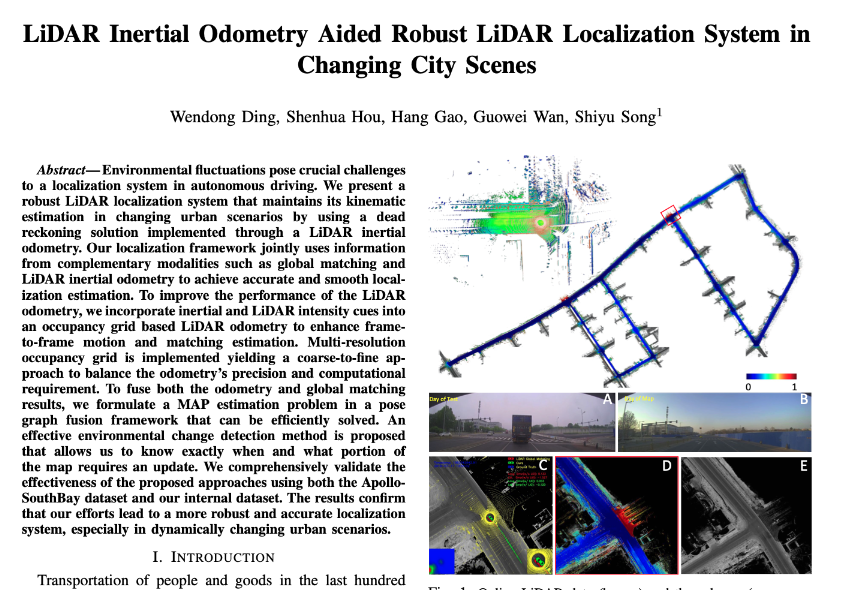
提出一种将激光惯性里程计(LIO)和激光扫描配定位模块进行整合,然后将两种观测融入到pose graph中进行联合优化的框架。基于激光扫描的global matching和 lio是互补的,这使的可以达到鲁棒的定位,以解决环境的短暂变化以及地图的误差问题,如图1所示。
本文贡献:
IN2LAAMA: Inertial Lidar Localization Autocalibration and Mapping. 用预积分去畸变,可以参考