Kalibr
Kalibr使用的IMU观测模型包含两种误差:
n,白噪声(波动较快)b,缓慢变化的bias
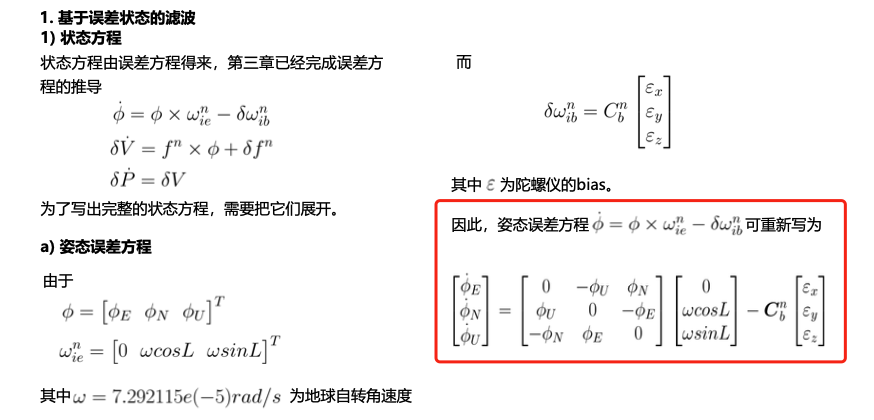
根据《惯导解算原理——捷联惯导更新算法及误差分析》分析,已经得到了三个误差方程:
姿态误差方程
\[
\begin{aligned}
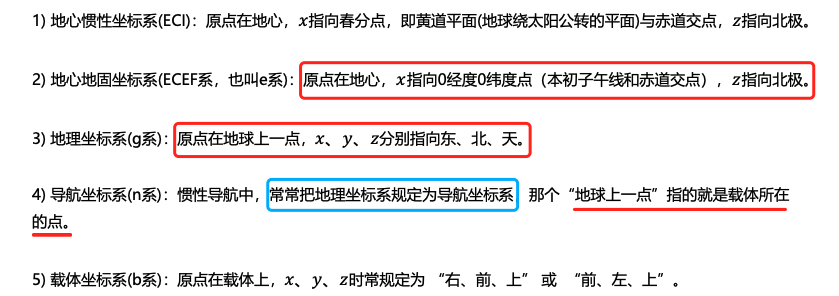
选取“东-北-天”地理坐标系作为惯导系统的导航参考坐标系,后面记为n系,则以n系作为参考系的姿态微分方程为:
\[
\dot{C}_b^n = C_b^n(\omega_{nb}^b \times)