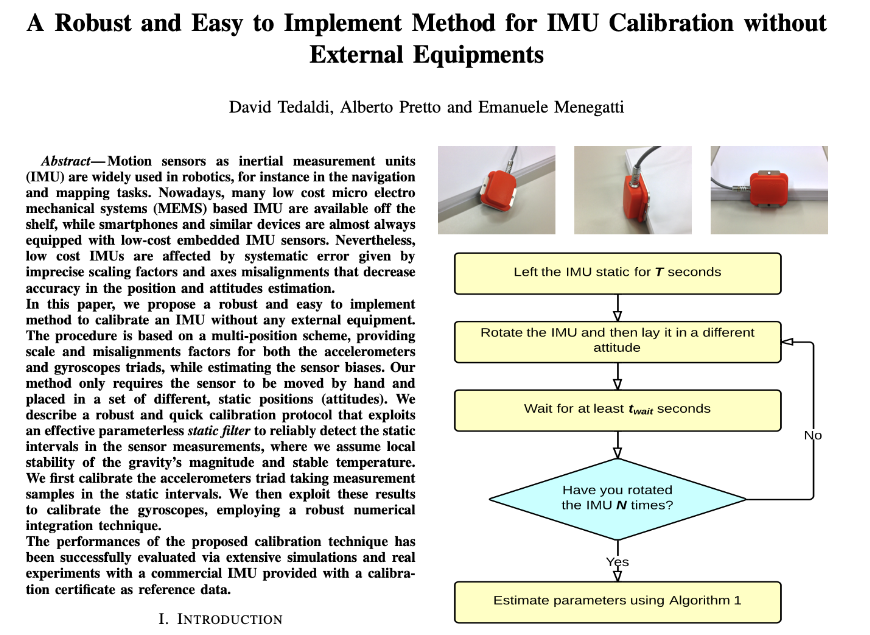
A Robust and Easy to Implement Method for IMU Calibration without External Equipments
介绍
一个理想的imu,其三轴应该是与三个正交的敏感轴重合的,并且具有确定的尺度因子,但不幸的是,低成本的mems imu通常会受到non accurate scaling,sensor axis misalignments,cross-axis sensitivities以及bias的影响。
IMU标定,其实就是对上述参数的辨识过程。