ROS2 bag----录制和回放
ros2 bag是用于记录系统中有关主题发布的数据的命令行工具。它累积在任何数量的主题上传递的数据,并将其保存在数据库中。然后,您可以重播数据以重现测试和实验的结果。录制主题也是共享您的作品并允许其他人重新创建作品的一种好方法。
安装ROS2bag
1 | sudo apt-get install ros-eloquent-ros2bag ros-eloquent-rosbag2* |
ROS2bag的使用
ros2 bag是用于记录系统中有关主题发布的数据的命令行工具。它累积在任何数量的主题上传递的数据,并将其保存在数据库中。然后,您可以重播数据以重现测试和实验的结果。录制主题也是共享您的作品并允许其他人重新创建作品的一种好方法。
1 | sudo apt-get install ros-eloquent-ros2bag ros-eloquent-rosbag2* |
ros2里面的launch是基于python的,与ros1的不一样。
turtlesim_mimic_launch.py通过在终端中输入以下命令来创建启动文件:
1 | touch launch/turtlesim_mimic_launch.py |
1 | sudo apt update |
1 | ros2 pkg executables turtlesim |
上面的命令应该返回turtlesim可执行文件的列表:
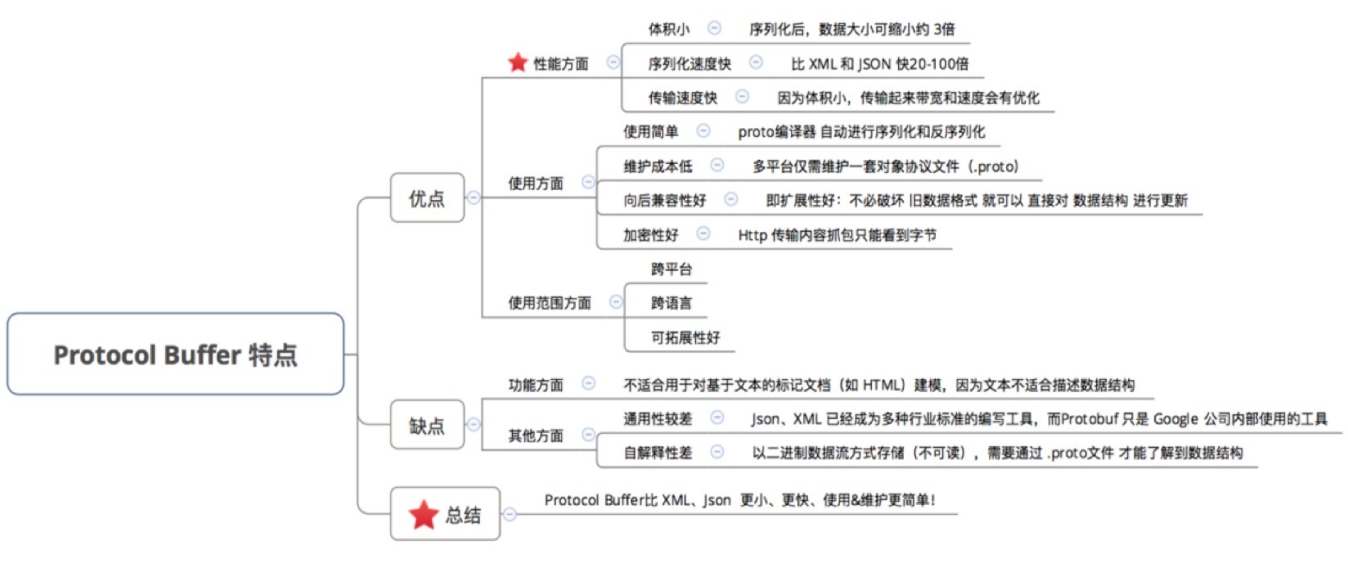
Protobuf是一种平台无关、语言无关、可扩展且轻便高效的序列化数据结构的协议,可以用于网络通信和数据存储
Tutorials示例:一个非常简单的“地址簿”应用程序,它可以在文件中读取和写入人们的联系方式。通讯录中的每个人都有一个姓名,一个ID,一个电子邮件地址和一个联系电话